


“新战略·金石奖”评选活动由低速无人驾驶产业联盟主办,旨在表彰在技术创新、产品迭代、场景应用及金融支持方面卓有成效的先锋与精英,并以此激发产业活力,引领行业风向,共同推动低速无人驾驶产业迈向更加繁荣的未来。
“2024低速无人驾驶行业年度评选”活动特设新质生产力推动先锋奖、年度创新产品奖、场景应用突破奖及优质服务商奖。该届评选活动中,代数律动双目视觉组合导航设备荣获“年度创新产品奖”。

公司介绍

上海代数律动成立于2022年,专注于多源融合高精度组合导航系统,在视觉融合算法、RTK/PPP-RTK算法、GNSS/INS紧组合算法、低轨卫星融合算法以及CORS/定轨算法等领域具有雄厚的研发实力,掌握多项核心技术。已推出AlgoT1视觉增强组合导航、AlgoT1-3高精度组合导航系统、AlgoAhead光纤精度组合导航系统等系列产品,在工程机械智能化、无人观光车、无人清扫车、无人船等多个场景下规模化应用。
获奖产品
双目视觉组合导航设备
双目视觉组合导航设备,一路RGB,一路红外摄像头,在不同光照环境下,实现视觉里程计+GNSS+INS深度融合,输出高精度三维导航信息。

创新性的将双目摄像头集成到组合导航设备中,保证在不同光照条件下仍可实现视觉里程计与RTK及INS的融合。
一体化封装的GNSS+INS+Vision组合导航系统,可为用户实时提供精确、稳定、连续的高精度三维导航解算信息;
提供多种标准化接口,同时内置4G模块与CORS帐号,自动接入RTK模式,提高使用便捷度;
稳定、精确采集卫星、惯导、视觉原始数据,并可搭配多源融合高精度后处理软件,进一步提高组合导航解算精度和稳定性。
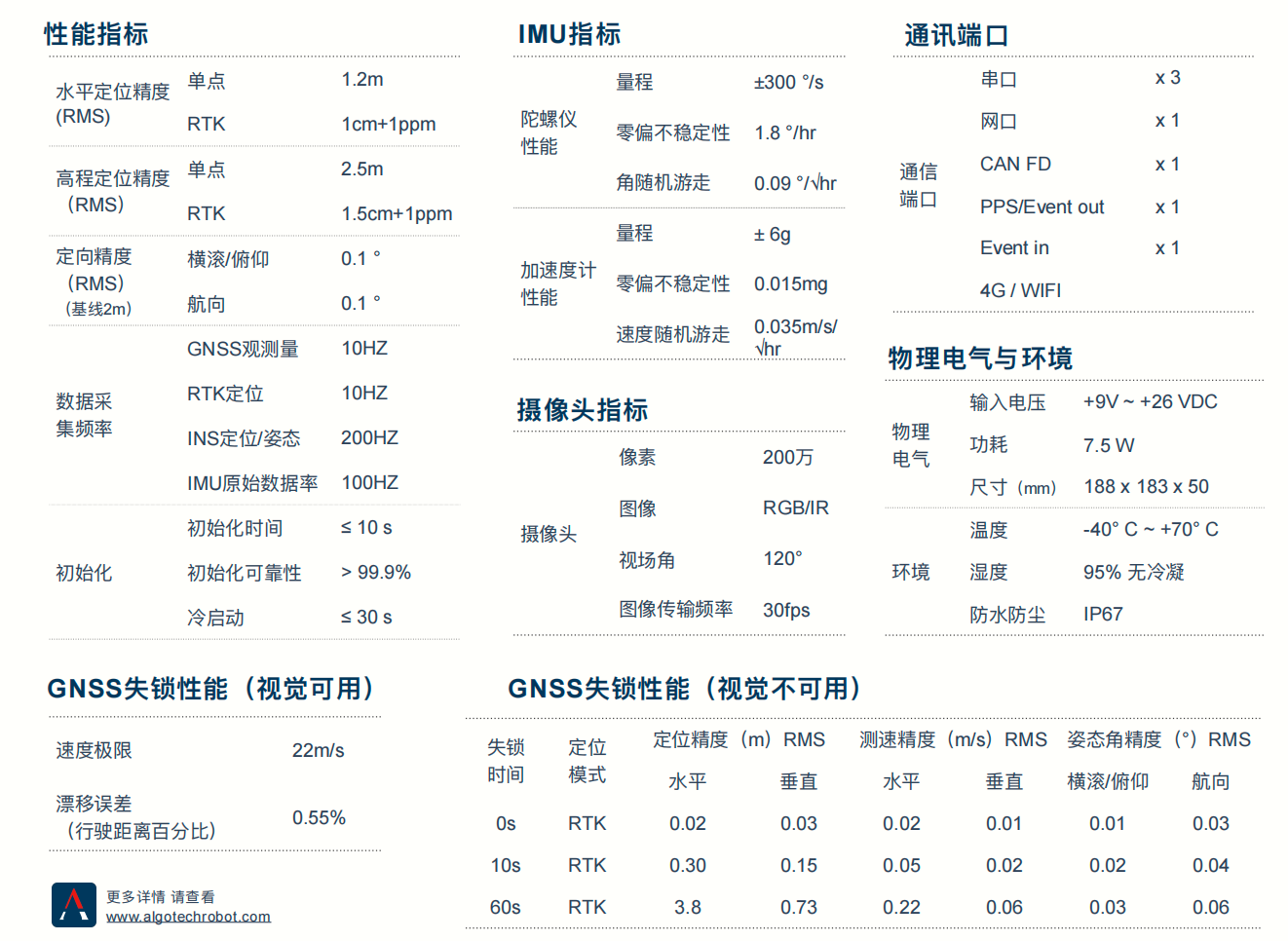
性能参数

应用情况
轨道列车定位项目
优势:隧道中轨道车辆在长度不低于2km的运行过程中,满足轨道车辆纵向定位平均误差(RMS)不高于10米。
具体情况:某轨道工程车项目中,在没有卫星信号情况下,单纯依靠IMU定位发散较快,单目摄像头无法满足隧道中黑暗的光照条件,采用本产品在隧道中可利用RGB摄像头与红外摄像头自动切换,实现稳定的视觉里程计与IMU融合定位,保证了2km运行距离纵向误差不超过10米。























