7月1日,在“2024(第四届)低速无人驾驶场景生态共建拓展大会”上,由低速无人驾驶产业联盟、新战略低速无人驾驶产业研究所主编,探维科技、导向公司、芯探科技等联合参编的《低速无人驾驶行业用传感器产品发展蓝皮书(2024版)》(下称《蓝皮书》)正式发布!
《蓝皮书》指出,针对不同场景的感知需求特点,传感器产品应用在不同类型的低速无人驾驶车辆上,打造的传感器融合方案有所不同。目前,行业领先的传感器产品供应商,已经通过技术创新助力各类低速无人驾驶车辆加速落地商用。(文末附电子版获取方式)
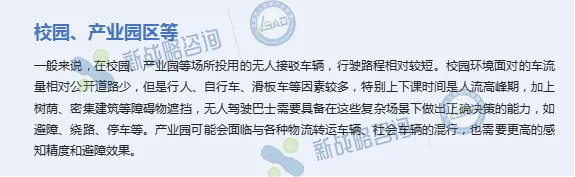
无人接驳
近年来,随着行业对无人接驳车辆在开放道路机动车道的应用和落地诉求增加,越来越多的城市启动了相关项目的示范运营。据悉,按照应用场所和执行任务的不同,无人接驳车辆可具体划分为无人接驳巴士、无人接驳观光车等。
无人接驳车辆在不同场景的感知难点
以智行者与金龙客车联合推出的Robobus为例,该车是面向园区、半开放道路及开放道路运营投放的自动驾驶产品。为推动Robobus在更多场景的商业化落地,车身搭载了摄像头、激光雷达、超声波雷达、毫米波雷达等各种环境感知传感器。探维科技的Focus激光雷达为主雷达,安装于车身前向位置。

探维科技激光雷达产品用于无人接驳巴士
据悉,探维科技Focus激光雷达主打“超高清、超视界”,是一款192线束产品,拥有120°超宽视野,FoV为120°×25°,最远探测距离达到300m,能够对目标物体进行光学测距,实现对周围环境的精准感知。Focus以高性能、高可靠性为无人接驳巴士提供丰富的感知数据,结合后台高阶算法,保证识别精准度和目标跟踪准确性,赋能出行安全与用户体验。
无人安防巡检
近年来,投用安防巡逻/巡检机器人的目标主要分为确保企业安全生产和城市治安维护。其中确保企业安全生产主要用于电力行业、石油化工行业、矿产开采行业、数据中心行业等,城市治安维护主要用于配合民警、安保人员在商场、机场、广场等公共场所监控环境异常情况、排查警情等。

安防巡逻/巡检机器人的感知难点
电力行业是安防巡检机器人应用最广泛的场景之一,在变电站中,巡检机器人可以检查变压器、断路器、隔离开关等设备的运行状态和温度,及时发现设备异常和故障;在输电线路中,巡检机器人可以沿着线路进行巡检,检查线路的运行状态和安全隐患;在配电房中,巡检机器人可以检查开关柜、电缆等设备的运行状态和温度,及时发现设备异常和故障。但在这些场所,电磁干扰是影响感知效果的重要因素之一。

导向公司超声波雷达产品用于安防机器人
城市治安维护在智慧城市建设中的确占据重要地位,随着科技的发展和智慧城市建设的推进,各地方公安系统近年来显著加大了安防巡逻机器人的采购需求。但安防巡逻机器人需要在人流量大、流动性强、环境复杂的场景中运行,在人群密集的场所,机器人需要准确地识别出障碍物并精准避障,但由于人群的繁杂性和流动性,这一任务变得更加困难。
以上种种感知难点,都对传感器的性能提出了更高要求。导向公司的超声波雷达产品KS114,自2019年上市以来,已经广泛用于巡检机器人、电力机器人、轨道机器人、清洁机器人等多个领域。该产品经受各种不同恶劣户外环境的考验,无论风吹、日晒、雨淋,均保证了运行零故障率,产品复购率极高。
KS114还衍生出了多款针对特殊环境的高性能产品,如KS114N,在零下40℃的极寒低温环境也可以正常工作;KS114NE,可以抗电磁干扰其允许临近电机布置而不被干扰,而其自体声波识别技术可以避开大部分干扰。这些性能优势,有利于巡检机器人在变电站、配电房等场所保持稳定精准的环境感知。
无人驾驶清洁环卫
《低速无人驾驶清扫车行业发展蓝皮书(2024版)》指出,2023年无人驾驶清洁环卫销售规模约24.1亿元,无人环卫车及商用清洁机器人(不含小型家用清洁机器人、墙面清洁机器人)落地超14000台,在各低速无人驾驶细分场景中占比最高。随着市政环卫智慧清扫项目的密集释出,室外场景的无人驾驶清扫车正加速落地。
在室外,无人驾驶清扫车的感知主要包括行驶环境识别、可行驶区域边界检测、障碍物与交通参与者识别以及运动状态判断。想实现车辆的安全、稳定运行,需要重点解决的环境感知问题包括场景切换识别、恶劣气候下导致的传感器失效处理,垃圾、细绳等影响驾驶的小障碍物检测以及坑洞、积水、台阶、施工等不可通行的道路异常情况检测。
无人驾驶清扫车环境感知的主要难点
由于室外环境复杂,加上不同传感器产品存在的不同的性能优劣势,无人驾驶清扫车要准确获取周围环境信息,不能单靠一种传感器,行业普遍采用的是多传感器融合感知。
无人驾驶清扫车采用多传感器融合,感知摄像头可捕捉图像识别算法需要的影像数据,毫米波雷达可准确测定清扫车与周边物体的相对位置、相对速度和运动方向。车辆周身的激光雷达使用人眼安全的激光探测清扫车周边物体,不仅可以适应各种气候环境影响,还可以追踪车辆前方、侧方及邻近车道的车辆,避免视觉盲区,保障行车安全。

芯探科技激光雷达产品用于无人驾驶清扫车
如芯探科技的XT-S240激光雷达用于无人驾驶清扫车,安装在车顶前段。该产品据称是业内目前最高线束的纯固态Flash激光雷达,拥有超小体积,重量仅198g,但具有106°×80°的超大视场角,在20米测量范围时能否覆盖1800平米的面积,并且在强光100klux的环境下依然性能不受影响。同时,产品具有240线垂直线束,并视场内具有均匀的0.33°H x 0.33°V角分辨分布,能够探测周围视场范围内的各类细小物体。
而对于检测无人驾驶清扫车前方垃圾厚度,则需要超声波雷达的辅助作用。特别是在室内应用的商用清洁机器人,准确检测前方垃圾厚度,不仅可以帮助机器人更有效地规划清扫路径,还可以确保机器人在不同情况下都能达到最佳的清扫效果。如导向公司的KS219,是一款小波束角高灵敏度超声波雷达,广泛用于商用清洁机器人,不仅能检测机器人前方垃圾厚度,还能检测垃圾桶的满溢情况,及时倾倒垃圾。
无人配送
无人配送是通过自动驾驶技术赋能,投用无人物流配送小车、配送机器人等产品,帮助缓解物流运力不足的压力。同时,无人小车可以7×24小时全天候作业,提高配送效率。
末端无人配送车的主要感知难点
无人配送车的安全性和可靠性是用户最关心的问题之一。《2023-2024年度中国低速无人驾驶产业发展研究报告》显示,2023年我国末端无人配送车辆的销售数量和规模增幅最为明显。随着今年杭州、苏州、上海、北京等地继续加大上路支持,快递配送、生鲜配送等业务覆盖面还将不断扩大。
为了满足未来规模商用的需要,无人配送车需要不断提升感知精度,通过融合不同传感器的数据,实现相互补充、减少误差,提高整体感知的鲁棒性和可靠性。

毫末智行小魔驼HD05的多传感器融合图示
一般末端无人配送车的传感器配置包括激光雷达、摄像头、毫米波雷达、惯导及天线等。如毫末智行的小魔驼HD05搭载高性能智能驾驶套件系统,选型乘用车已量产产品同型号传感器,包括固态激光雷达、高清相机、毫米波雷达、定位及网络设备,同时采用毫末自研车规级域控制器IDC 3.0,具备360TOPS高算力、高稳定性及丰富的传感器/数据接口。
其中激光雷达应用在末端无人配送车上,可帮助执行的任务包括障碍物检测、路线规划、车辆定位、交通监管等多个方面。激光雷达可以实时地扫描道路上的物体,并将物体的位置和大小等信息生成三维点云图,无人配送车通过激光雷达获取到的点云数据进行避障、导航等,为无人配送车的安全、高效运行提供了重要保障。探维科技、芯探科技、图达通等代表企业的激光雷达产品,都在无人配送小车上有广泛的应用。
矿区无人驾驶
矿区无人驾驶主要是在矿产资源运输环节,通过无人驾驶技术提高生产效率和安全性,主要应用的车型是无人驾驶矿卡和无人驾驶宽体自卸车,且以无人驾驶宽体车的应用占比为高。除了这两种主要车型,铲运车、胶轮运输车等更多矿用专用车也逐渐实现无人驾驶。
矿区无人驾驶的环境感知难点,包括气候环境、道路条件、驾驶环境等多个方面。如在露天矿,灰尘和粉尘问题尤为突出,不仅会影响传感器的性能,还可能在前方形成一片尘雾,遮挡无人驾驶车辆的“视线”,影响探测质量,甚至导致误判。下雨时,矿区道路会变得泥泞不堪,布满水坑,这会导致道路缺乏明确的特征,增加车道边界识别的难度。在新疆的不少矿区,通常还具有海拔高、温度低、气压低、含氧量低等特点。
以特变电工新疆天池能源南露天煤矿为例,该矿所处地区四季变化明显,尤其冬季寒潮来临时,降温剧烈,可至零下39摄氏度。同时露天矿区无遮挡,当地大风日数多、风力强,造成大量的煤尘。一系列极端气候和恶劣工况,对无人驾驶感知硬件提出了更严格的要求。
据了解,易控智驾在该矿运营了203台无人矿车,是全球单矿规模最大的无人矿车车队。易控智驾选用了Seyond图达通高性能“猎鹰”激光雷达作为前向主雷达,融入其无人驾驶整体方案。凭借“猎鹰”车规级的高可靠性以及1550nm波长的先天优势,在项目常态化“安全员下车”连续运营期间,产品历经极寒/极热气候、局部扬尘、阳光直射、强烈振动等考验,始终能为无人矿车提供实时准确的环境感知,保障车辆行驶安全。

Seyond图达通激光雷达产品用于无人矿车
特变电工南露天煤矿中的无人矿车采取多车编组运行的模式,得益于“猎鹰”的高精度远距离探测能力,在全面提升无人车队感知范围的同时,还能准确探测到路沿、车辙线及落石等障碍物,帮助车队在复杂的工况中更早、更稳定地发现潜在危险,为易控智驾无人驾驶系统提供更充裕的计算和执行时间,保障在矿区的安全、高效和稳定运行。
在井工矿,矿井内存在各种障碍物,如巷道、支架、设备、轨道等,这些障碍物形状各异、大小不一,且可能随时移动或变化,增加了无人驾驶矿车感知和避障的难度。矿井环境通常非常恶劣,如高湿度、高温度、高粉尘等。另外,由于矿井深入地下,GPS信号通常非常弱或完全无法接收,这些都会给无人驾驶矿车的精确定位和导航带来极大的挑战,单一传感器显然无法满足作业需要。
为应对井工矿的感知难点,除了采用多传感器融合技术,利用车端传感器和车联网支持下的协同感知,也有利于实现车辆局部甚至矿井全局的精确详尽感知。据悉,目前4D毫米波雷达在井工矿无人驾驶项目中发挥着越来越重要的作用。