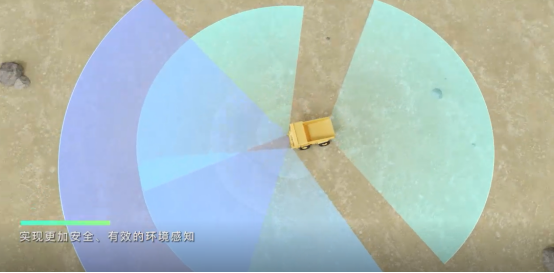
自动驾驶的核心技术一般可分为感知、决策、执行几个层面。其中,感知层主要通过摄像头、激光雷达、毫米波雷达等各类传感器感知并收集外部环境信息,帮助无人车解决“我在哪”的问题,是无人车运行决策和执行的重要参考依据。
但有人驾驶尚且容易受浓雾、雨雪等极端恶劣天气的影响,容易发生交通事故,自动驾驶车辆要经受的考验可能更大。随着近期全国多个省市雨雪来袭,各地运行的低速无人车能否继续安全可靠作业也成为用户关注重点。
低速无人车不断通过雨雪天“路考”
据新战略低速无人驾驶产业研究所了解,早在 2020 年 5 月,国家能源集团宝日希勒露天煤矿启动极寒型复杂气候环境露天煤矿无人驾驶卡车编组运行项目,并于 2021 年 9 月顺利通过验收,项目研究成果填补了当时极寒地区矿山设备无人化技术领域的多项空白。

中科慧拓无人矿车在零下42°极寒环境运行
而在近期,除了无人矿车,无人环卫车、无人配送车、无人接驳车等更多低速无人车也在自动驾驶朋友圈秀技雨雪天“路考”。

如福龙马城服机器人发布了 CFSD1501 L4级智能清扫机器人近期在湖南长沙的雨雪天气下运行的视频。该产品是其全球首款基于滑板底盘的 L4 级无人清扫机器人,主要应用于封闭/半封闭的学校、园区/厂区、景区、公园/广场、高速服务区等场景,可以实现全天时、全流程、全自动高效清扫作业。

毫末智行的末端物流自动配送车小魔驼,在北京顺义的街头巷尾,突破严寒和积雪的双重考验,全力满足居民的配送需求。小魔驼目前已全新升级了 3.0 版本,产品在商超履约、快递接驳、校园配送、智慧社区等9大场景开启了常态运营,无人配送总订单已超25万单。

雄安新区的智能网联巴士,在雨雪路面依旧可以对车道标线等信息进行精准识别,能够在障碍物突然闯入时精准识别并紧急避让等等。
雨雪天气对感知系统的影响和突破关键点
目前,自动驾驶车辆的环境感知主要有两种技术路线,一种是以摄像机为主导的多传感器融合方案,另一种是以激光雷达为主导,其他传感器为辅助的技术方案,这两种方案常用的传感器种类包括但不限于激光雷达、毫米波雷达、超声波雷达、摄像头等。
为了帮助自动驾驶车辆更好地适应雨雪天低温环境,能见度低、识别效果差等困难,不仅是整体解决方案的提升,各类传感器的技术提升也是帮助低速无人车在各类场景持续突破的关键。
摄像头
一般认为,摄像头很容易受天气影响,一滴雨、一粒沙子、一片雪花都会对摄像头造成遮挡,无法正确感知周围环境。此外,晴天阳光的照射、玻璃的反射都会使摄像头的可见度降低。
为应对一系列环境干扰问题,摄像头产品除了提高技术水平,也升级了不少保护措施。如森云智能自主研发的CMS电子外后视镜摄像模组具有电子加热除雾、防眩光、低延时等功能,符合车规级性能,以及具有经过专业图像调试的高质量图像效果,并配有AA车载规格镜头,模组整体可达到IP67防护等级。其中电子加热除雾功能特别适用雨雪天气,不惧寒雾。

激光雷达
激光雷达精度高、穿透力强,可以实时扫描周围环境建立三维模型,拥有很高的可靠性和精确性,但对恶劣天气的适应性则稍微差一些。
雨天对激光雷达的影响相对较小,除暴雨等极端降雨条件下,激光雷达基本不会受到任何影响。与降雨不同,雪由由大量白色不透明的冰晶(雪晶)和其聚合物(雪团)组成,很容易堆积形成障碍物,从而影响激光雷达的扫描距离,或者导致激光雷达的错误探测。
雨雪天尤其考验激光雷达的环境适应性,目前行业也在不断迭代提高产品性能。如图达通猎鹰K激光雷达,具有车规级的高可靠性以及1550nm波长的先天优势,在露天煤矿冬季寒潮来临时,激光雷达产品也能经受零下39°的极寒环境,始终全天候保持着稳定、准确的探测状态,为无人驾驶矿卡的24小时连续运行保驾护航。
毫米波雷达
毫米波雷达探测距离远,精度虽没有激光雷达高,但对雾、烟、灰尘的穿透能力极强,在恶劣天气条件下,整体表现更好。特别是当下热推的4D毫米波雷达,相较于传统的毫米波雷达,具有更高的信息维度感知能力和更精细的空间定位能力。
但毫米波雷达也并非全无缺点,其在有雨有雾或大雨的天气下表现欠佳,性能会出现大幅下降,且毫米波雷达也存在对行人识别不足的问题。
超声波雷达
超声波雷达具有频率高、波长短、绕射现象小、方向性好、能够成为射线而定向传播等优点,但探测距离很短,因此常用于短距离测量,如泊车场景。
超声波雷达受天气情况影响大,不同温度情况下,测量的距离也不尽相同,在测量较远距离目标时,其回波信号会比较弱,无法精确描述障碍物的位置。
综合来看,以上各类传感器优劣势并存,目前自动驾驶车辆无法单靠一种传感器准确感知和获取环境信息,但通过多传感器融合、数据组合的方式,可以做到优势互补,扬长避短。
实现自动驾驶是一个循序渐进的过程,目前我国低速无人驾驶已经实现从“0”到“1”的突破,开始从小批量落地应用向规模化商用加速拓展。针对无人车在雨雪以及更多极端环境、长尾场景的安全稳定行驶问题,产业链上下游企业都是在通过技术的协同发展,持续且大量的数据训练和应用积累,探寻“更优解”而非“最优解”,这也是低速无人驾驶产业联盟及联盟企业共同的愿景和目标。