


日本“自动驾驶商务研讨会” 「自動走行ビジネス検討会」于2015年2月由经济产业省制造产业局和国土交通省汽车局主推、汽车制造商、供应商及行业有识之士等参加成立,目的是通过产学官的合作推进自动驾驶的商业化。 “自动驾驶商务研讨会”在2021年3月8日举行第12次会议,并于2021年3月15日公布了名为《面向实现和普及自动驾驶的措施报告与方针》(「自動走行の実現及び普及に向けた取組報告と方針」)的Version 5.0概要方案摘要报告,报告内还介绍了2020年新设的“服务车协调WG”和“次期项目WG”的工作情况。
会议对2020年的研讨会议及活动实施情况进行了回顾。
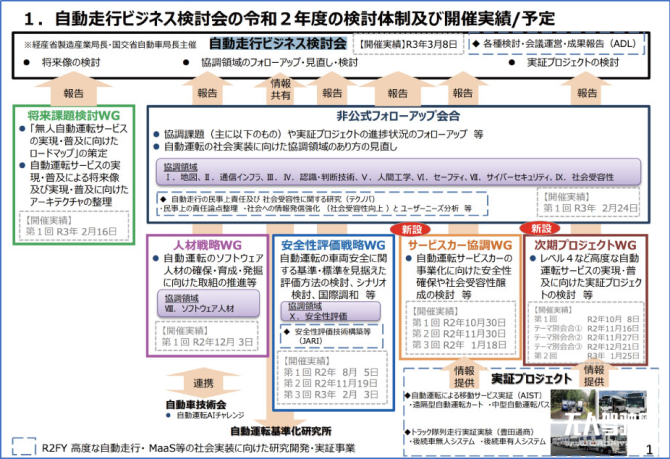
2020年工作回顾
经济产业省、国土交通省汽车局致力于最后一公里自动驾驶验证、高速公路卡车编队行驶验证实验。2021年度是各项目的最后一年,正在努力实现在之前的成长战略中提出的2020年内限定地域无人驾驶出行服务、2020年内高速公路卡车后车无人编队行驶技术目标。
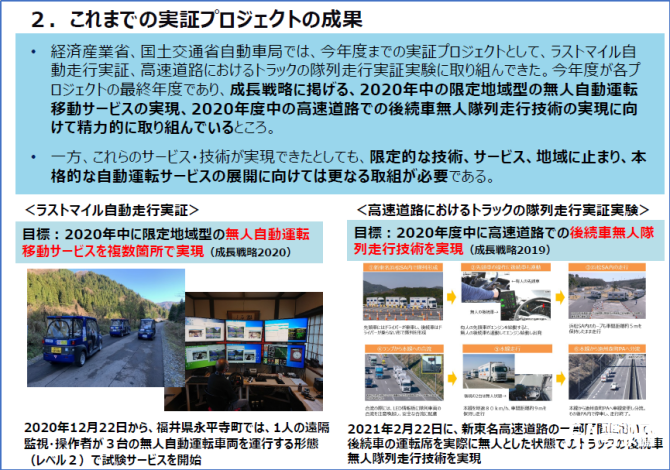
实际验证试验项目成果 从2020年12月22日开始,在福井县永平寺町,采用1名操作员远程监视、运行3辆无人驾驶车辆的形式(L2级)开始出行服务测试。 2021年2月22日,在新东名高速公路的一部分区间内,实现了卡车后车无人编队行驶技术测试。

但是,即使实现了这些服务和技术,也仅仅是在限定的技术、服务、地区条件下,需要面向真正的自动驾驶服务的展开进一步的努力。
研讨会在2020年新设了“服务车协调WG”和“次期项目WG”两个工作组。其中“次期项目WG”工作组此次总结了面向社会实施无人驾驶服务的“次期项目工程表”,提出了2021年-2025年5年期间应致力解决的4个课题。
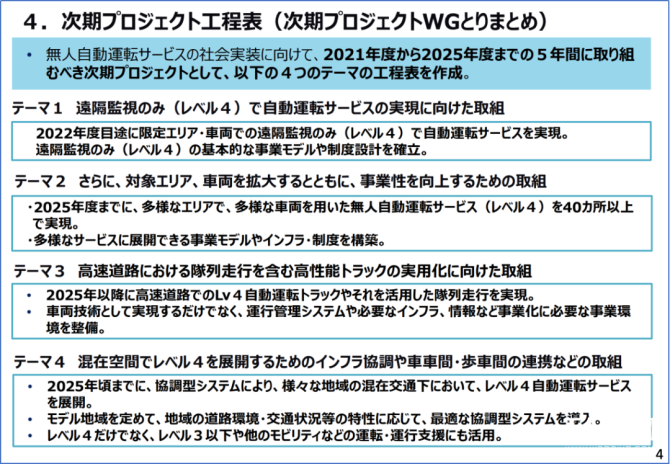
次期项目工程表(出典:经济产业省) ·主题1:仅通过远程监视(L4级)实现自动驾驶服务的措施。 目标是在2022年实现在限定区域、车辆条件下的仅依赖远程监控(L4级)的自动驾驶服务。
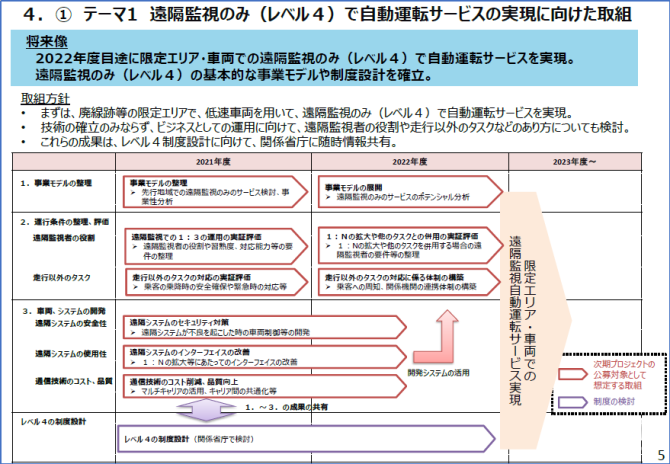
主题1:仅通过远程监视(L4级)实现自动驾驶服务的措施 ·主题2:进一步扩大对象区域、车辆的同时,为了提高商业性而采取的措施。 目标是2025年在40个地点实现多种区域、多样化车辆的无人自动驾驶服务(L4级)。同时构建能够实施多样化服务的业务模型和基础设施、制度。
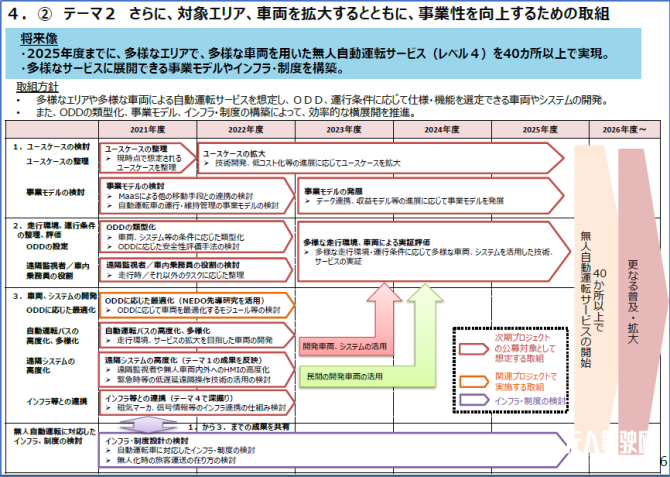
主题2:进一步扩大对象区域、车辆的同时,为了提高商业性而采取的措施 ·主题3:面向包括在高速公路上编队行驶在内的高性能卡车的实用化的措施。 目标是2025年后实现高速公路L4级自动驾驶卡车以及采用该技术的编队行驶。除实现车辆技术之外,同时整备业务化所需的运营管理系统、必要的基础设施、信息等业务环境。
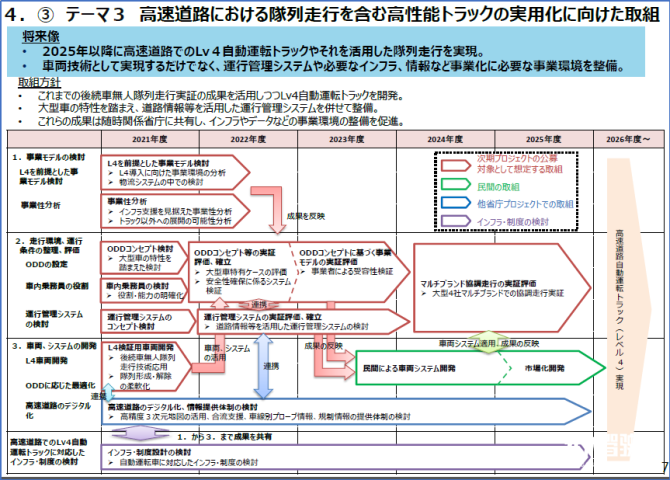
主题3:面向包括在高速公路上编队行驶在内的高性能卡车的实用化的措施 ·主题4:为了推广混合交通条件下L4级应用的基础设施协调、车车间及车辆与行人之间的协调等措施。 目标是至2025年通过协调型系统,推广在各种地区的混合交通条件下的L4级自动驾驶服务。
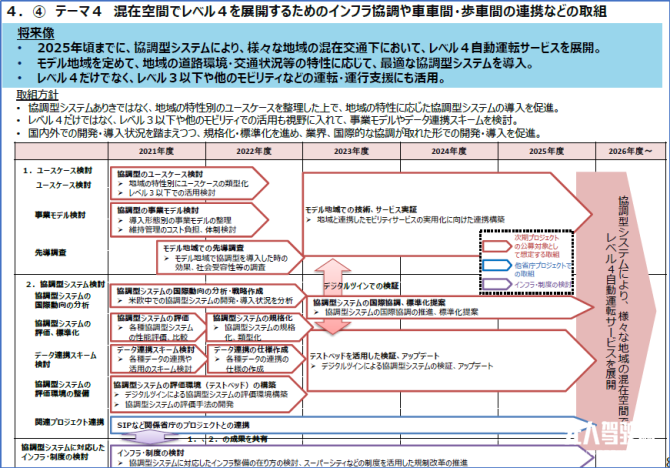
主题4:混合交通条件下L4级应用的基础设施协调、车车间及车辆与行人之间的协调
报告展示了日本实现、普及无人驾驶服务的城市、交通系统的未来愿景。
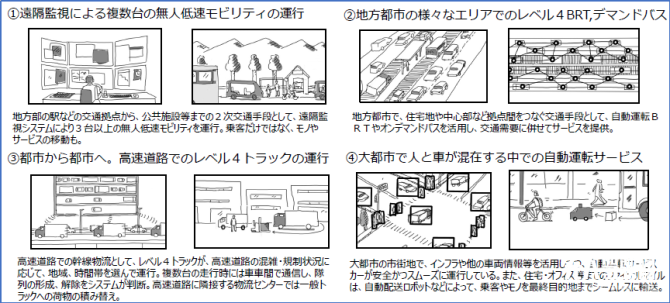
无人驾驶服务的城市、交通系统的未来愿景 ①通过远程监控运行多台无人低速出行车辆。 ②在地方城市各种区域的L4级BRT、按需服务巴士。 ③从城市到城市的高速公路L4级卡车运行。 ④大城市内人和车混杂条件下的自动驾驶服务。
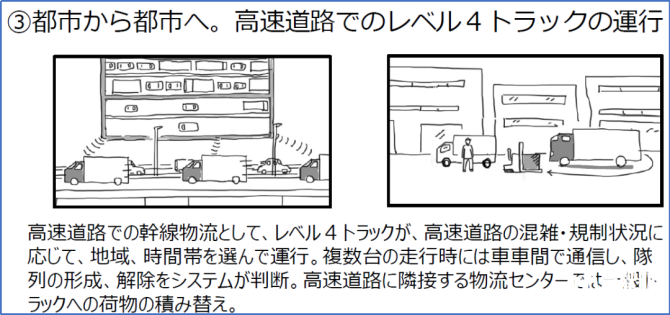
高速公路L4级卡车运行 针对高速公路干线物流,L4级卡车根据高速公路的拥堵和限制状况,选择地区和时间段运行。多台行驶时在车辆之间进行通信,系统判断编队行驶组队和解除编队。在与高速公路相邻的物流中心,货物转运至一般卡车。
日本为了维持和强化在自动驾驶领域的国际竞争力,在继续推进至今为止的协调领域的同时,基于新的动向,在注意竞争和协调的区分的同时,将深化和扩大协调领域。作为今后协调领域的课题,在次期项目研究中将考虑以下几点,同时还将采用更广泛、综合性的活动。 1)ODD的类型化 根据个别地区的ODD进行车辆开发和安全性评价是低效的,通过将ODD进行类型化并相应地进行传感器组成等模块化和风险评价方法的模式化,探讨在其他地区顺利推广的方案。 2)考虑远程监控等有人参与的形式 依赖系统来应对包括乘客疾病、灾害、事故发生等紧急情况在内的所有情况的做法并不是最高效的做法。在这种情况下,应考虑远程监控等人为参与方式以及HMI等系统与人的协调。 3)L4级服务的相关人员之间的责任分担 在L4级服务中不需要驾驶操作,另一方面,以往由驾驶员承担的从运行到维护管理和保养检查的义务和功能可能需要由多个相关人员承担,在这种情况下需要考虑相关人员之间的责任分担等。 4)传感器、数据格式等的通用化/标准化 在L4级服务的市场受到限制的条件下,为了降低成本和促进无缝服务,讨论实施面向ADAS的技术和其他交通手段、与基础设施方面的传感器数据格式等的通用化和标准化。 5)基础设施合作的机制 要将L4级服务扩展到与普通车辆和行人共存的交通环境,仅靠车辆来应对的效果是有限的,应考虑来自基础设施方面的传感器的支持以及对应L4级的基础设施的整备,但是需要对包括维持管理和收益模型等在内的基础设施协作的方式进行研讨。 按照计划,《面向实现和普及自动驾驶的措施报告与方针》(「自動走行の実現及び普及に向けた取組報告と方針」)Version 5.0全文报告将在3-4月发布。
近期工作成果回顾
经济产业省、国土交通省汽车局致力于最后一公里自动驾驶验证、高速公路卡车编队行驶验证实验。2021年度是各项目的最后一年,正在努力实现在之前的成长战略中提出的2020年内限定地域无人驾驶出行服务、2020年内高速公路卡车后车无人编队行驶技术目标。
“次期项目WG”工作组提出了2021年-2025年课题
未来交通愿景























