无人驾驶汽车要真正到达L5级别,核心在等待一次“涌现”,而这个时刻预测会发生在L3阶段,因为大范围由机器负责的自动驾驶系统必须突破L3阶段由多个维度组成的“大坝”。但是并不是说,我们一定要用这种方式才能达到落地效果,因为L4阶段还有一个“小池塘”,这就是限定范围L4自动驾驶。那么,在中国国情下,自动驾驶还要解决哪些问题呢?
复杂环境问题
要说中国国情,最难的仍然是复杂的交通环境。
数据显示,截至今年6月,中国机动车保有量达3.6亿辆,其中,汽车保有量达2.7亿辆,占机动车总量的75%。这个数据可能已经超过美国,中国跃升成为世界上汽车最多的国家。
城市方面,汽车保有量超过100万辆的城市共有69个,与去年同期相比增加3个。其中,汽车保有量超过200万辆城市31个,超过300万辆城市12个。像北京的机动车保有量直逼650万辆,每天有大量的汽车行驶在路面上,路况非常复杂,剐蹭等现象时有发生。
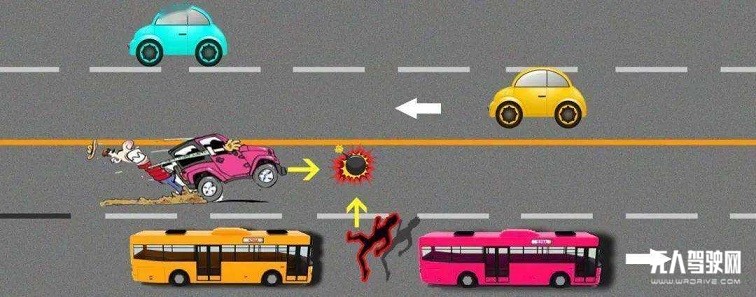
这些都还没有算上不可感知内容,比如前面正在发生人员追逐或者争斗,路面突然塌陷等等,这些情况自动驾驶车可能并不知道,环境的复杂性,可以确认的超出了目前视觉深度学习任何可部署感知网络的理论容量。
关于涉及国内大范围的自动驾驶道德规范,法律准则都是缺失的。有人说,这不对,从2017年开始,全国各地都出台了很多新的政策,鼓励自动驾驶发展,但仔细研究一下不难发现,这些政策聚焦点大多还是纲领文件和建设目标,但无一例外地都避开了道路安全法等法律层面的实质性内容。
小到测绘法禁止高精度地图部署城区和部分城市高架,大到《中华人民共和国道路交通安全法》《中华人民共和国公路法》等禁止了在公路上进行自动驾驶实验,并认定自动驾驶车不能承担肇事责任。这些法律法规的限制几乎就可以把整个自动驾驶系统“包了饺子”。
这也导致了自动驾驶车辆,无法在真正意义上的开放道路当中行驶。无人驾驶法律法规的完善和修订,相关的伦理规范的界定,都充满着严峻的挑战。基建设施的缺失
目前高等级的自动驾驶,由于大规模部署,需要对成本严格控制,因此局部感知力受限,时常需要基建设施“待摊”一部分成本。
先修路再跑车,乍看像是弥补单车感知能力的曲线救国之法,实际上是自动驾驶走出当前困境的出路之一。从“聪明的车”到“智慧的路”,本质上是通过“5G+车路协同”实现融合创新,达到“1+1>2”的共振效应。
此外,一旦打开了“上帝之眼”,智能汽车与路侧传感器、云服务平台等相互融合、互通有无,将极大降低智能汽车的准入门槛和造价成本。5G车路协同无疑是眼下自动驾驶产业化落地的最佳路径。
但大范围的基建设施部署仍然是一个巨大的问题。哪怕城市全部都改善基础设施,但要在农村普及并达到相应标准,估计还是难度有点大的。
复杂环境、法律缺失、基建设施不完善这“三座大山”,对自动驾驶的大范围落地都是致命的影响。但是好在方法总比困难多。
一个中国司机跑去美国开车,由于风俗、习惯、驾驶规则不同,估计很长一段时间内都还是有些危险的,更别说机器了。如果我们假定L4级别可以是一个局部地区应用,情况就有了明显的改观,这也许正是短期内解决问题最合理的方案。
针对第一个环境复杂性问题,虽然有限范围内会存在很多极端案例,但是由于限定范围,复杂性问题得到有效控制, 可控的包括增加针对性的安全设施、提醒标志、控制交通参与者的流向等,并且由于范围确认,哪怕不可控制的天气因素,仍然可以通过营运方案来控制。另外由于有限空间,场景变化被限定在一个更小范围,可以有效缓解目前深度学习网络的参数容量压力。
针对第二个法律缺失问题,各个城市纷纷发布了自己的智能网联示范区以及相关的管理办法。针对“没有驾驶员”不符合相关要求这一点,大部分的地方性规范均给出了相似的意见:默认测试驾驶员为车辆驾驶员,根据道路交通安全管理部门的认定结果,由其承担相应的法律责任。针对不能在公共道路测试这一项,各地网联示范区的道路均被合理地进行了一定的隔离和控制,因此可以认为是“封闭”的,而非公共道路。
针对第三个基础设施缺失问题,只要在有限范围内,无论多么密集的路侧系统,成本都是可控的。5G设备、路侧传感器或是各类传统交通设施设备的部署,足够支持应对局部感知解决不了的问题,比如“鬼探头”;或是在车辆故障后,通过5G视频远程控制,远程司机亦能够将车辆驶离相关位置。