据悉,德国供应商ZF Friedrichshafen(采埃孚)与硅谷初创企业Aeva周二宣布,两家公司正合作研发用于自动驾驶汽车的激光雷达传感器。
在自动驾驶技术中,为了检测车辆周围环境的物体,需要使用到环境传感器,这其中就包含有激光雷达等传感器,但是这种传感器往往只能检测在直接视野范围内的物体,当路面发生镜反射或者车辆周围的环境中出现物体的反射伪影时,就会对于检测造成干扰。
而这种干扰往往会对于车辆的控制系统带来影响,因此,为了提高驾驶的安全性以及舒适性,需要根据更加精准的对于周围环境进行评估的系统,这样才能获取到周围的交通环境,从而进行正确的智能控制。
为此,采埃孚在19年11月25日申请了一项名为“通过间接信号反射来识别物体”的发明专利(申请号:201911164523.9)申请人为采埃孚主动安全股份有限公司。
根据该专利目前公开的资料,让我们一起来看看这项专利技术吧。
为装载有控制系统和环境传感器的无人驾驶车辆,图示的车辆安装有三个环境传感器14、16和18,它们向控制系统10发送其采集到的数据和信号。例如,在车辆前进的方向上的传感器14可以检测车辆前方的区域20。
这些环境传感器有例如:不同位置的摄像头、雷达传感器、激光雷达传感器、超声传感器等,可以完成不同的数据采集任务,控制系统可以从这些传感器采集到的数据中分析出目前车辆周围的其他车辆的信息(例如车速)、行驶轨迹以及侧面车道边界等信息,这些信息可以帮助无人驾驶车辆行驶。
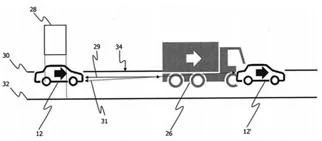
就展示了当无人驾驶车辆跟随在另一辆车之后形式,同时从桥形路标牌下行驶的情形,在通过桥形路标牌之前,仅利用传感器信号和控制信号检测前面行驶的车辆,例如检测与其之间的距离以及速度等,来判断需不需要进行制动等操作。
而当无人驾驶汽车行驶到桥形路标牌下方时,由于例如有些桥形路标牌需要有限高,这就需要无人驾驶车辆能够理解其所处的位置,是跟在一辆车的后面,且其上方有限高物体,而利用雷达波就可以很巧妙的完成这个任务。
因为无人驾驶车辆发出的雷达波,有一部分会被前车反弹到头顶的路标牌上又反弹回来,再次被无人驾驶汽车所接收,通过这种多次进行雷达波反射,就可与被无人驾驶汽车上的环境传感器14、16以及18所检测到,并提供给控制系统相应的数据,从而让无人驾驶汽车可以理解其所在的位置信息。
那么,车辆该何时来判断车身已经离开了头顶的限高物体呢?如上图所示,方案也很巧妙,依旧是利用雷达波在前车与头顶的物体进行反射并由车身上的传感器所接收,但不同的是,此时由于车辆是离开限高物体,因此是由无人驾驶车辆尾部的传感器来接收信号,这样就可以作为一种判断的依据。
可以看到,虽然该方案中给出了上述这样的环境示意方案,但是我们还是可以发现其不足,因为激光雷达的方案,必定需要有前方的物体来进行反射,那么当车前没有物体时,此时利用雷达波反射的方式来判断是否通过限高物就会失效。不过,虽然这样,但是我们也可以看到研究新型的更高精度的激光雷达传感器是必要的,其具有不可替代的优势。
最后,我们来看看这种控制方法的流程图,首先,基于系统采集到的环境数据来检测无人驾驶车辆周围环境中的物体。其次,基于周围环境的位置、速度等信息来反馈给控制系统,最后再由控制系统基于其他车辆的行驶信息来调整无人驾驶汽车的行驶状态。
以上就是采埃孚发明的利用反射来识别物体的无人驾驶方案,相比于传统的驾驶辅助系统,这种借助于大量传感器的控制系统提高了驾驶的安全性以及驾驶舒适性。同时,由于车辆四周的信息都可以被车辆所采集,因此可以发现没有位于传感器视野范围内的物体,可以实现对车辆周围实际环境的更好掌控。