


报告中这些提法,或许有坚实的理由。不过,对这个行业,仍显得有点激进:首先是安全问题,激进可能导致事故。公众能接受更频繁的事故吗,自动驾驶企业能承担这一后果吗?
加州机动车辆管理局的自动驾驶车辆脱线报告
加州机动车辆管理局(dmv.ca.gov)发布的2019自动驾驶车辆脱线报告(The autonomous vehicle disengagement reports),对各家自动驾驶公司在当地测试并自主上报的安全员干预车辆情况进行了统计。
根据各家公司自主统计上报,百度的车辆每18050英里需进行一次干预,其次是谷歌姊妹公司Waymo,每次干预间隔达到13219英里,之后是CRUISE,AutoX,Pony.ai,然后是Nuro,Zoox和PlusAI,而国内还有一家在当地测试并自主统计上报的公司是滴滴,平均干预间隔为1535英里每次。
除平均干预里程间隔外,另一个引人注目的点,是该指标的进步速度。从媒体理出的加州DMV历年统计的安全员干预情况表看,2018-2019年,有些公司的这一指标出现了惊人进步。但数据也引起一些专业人员对真实性的尖锐质疑。
脱线率(disengagement rates)已成为观察自动驾驶车辆成熟度的指标。但这一指标还不够,需参考测试所在公共道路的环境,比如,是人烟稀少的农村还是人口密集的城市。
当然,由于这些指标是自动驾驶公司自主上报,其数据真实性也一直备受质疑。
在《中国自动驾驶小汽车营运能力分析报告(2019-2020年度)》里,没有提及这类指标,故而无从观察是否具备取消安全员的可行性。目前唯一取消安全员的Waymo公司,其人工干预的平均间隔为13219英里。如果报告鼓励取消安全员,那理应提出取消安全员的观察指标,或提出其他步骤与衡量方法。
为什么需要安全员?
需要安全员的首要理由是安全。而对自动驾驶研发而言,安全员还有改进系统的作用。
美国道路安全保险研究所(IIHS)今年六月提交的一份报告认为,如果自动驾驶车辆能达到人的水平,那么自动驾驶汽车可能最多防止大约三分之一的车祸。这是对5000起撞车事故分析后得出的结论。这个结论打破了关于自动驾驶会彻底安全的断论,也受到许多自动驾驶从业者的批评。
这份报告把事故因素分为五类:观察错误、预测判断错误、决策错误、执行错误、失能。这五类中,观察错误的事故占23%,失能如酒驾或突发疾病占10%,这两类事故不会在成熟的自动驾驶车辆上发生。而在预测判断、决策和执行方面,目前看,自动驾驶还未达到人类水平,因此只能减少三分之一的事故。
而2018年3月Uber测试车的撞车死亡事故也可作为这一判断的例证。事故前6秒,横穿的行人和自行车被自动驾驶车辆标记为未知物体,在1.3秒前,自动驾驶车辆提醒紧急制动,但安全员未能做到,最后以63公里的时速撞击了行人。
这起事故证明了自动驾驶车辆预测能力的严重缺陷。人类驾驶员面对未知物体的处理,要比自动驾驶车辆谨慎很多。正常的驾驶员,会关注并预测未知物体动向,无法判断时,会采用保守方式规避,譬如刹车或变道远离等。视频显示,事故前六分钟到事故发生,该车安全员处在频频往下方看的分心状态。而在警察的调查报告里,同样场景的几次试验中,85%的驾驶人能在44米前看到行人并应对该场景。
而科技公司一直鼓吹,传感器可看到人不能见的物体,并避开这些物体。这类宣传让一些安全员经常处在分心的工作状态。舆论在对这起事故的反思里,还批评了科技公司采取捷径获得成功的冒进思维。
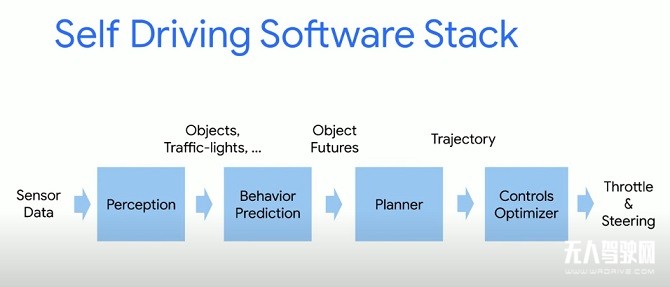
想当然认为自动驾驶车辆会比人类驾驶安全,然后认为可以取消安全员,只能说明提出者对驾驶行为不了解。分解驾驶行为过程,就能了解自动驾驶能解决什么、不能解决什么,安全员又要做什么。
同样的技术,也可用于改善现状交通安全。中国一些机构提出取消安全员的想法,也说明了对交通安全的态度,再次验证改善交通安全现状的艰难。切勿让想当然成为安全政策的主导思路。
安全员对自动驾驶车辆的好处,不只是避免事故,还有改进系统的作用。
上路的自动驾驶车辆,往往是只具备最低安全和最低能力的车辆系统。行驶过程中,会出现轻微的车道偏移、急刹、停顿、急加速、不合适变道等,不一定会造成风险,但仍不合适。安全员即便不干预,也可及时记录感受,并理出细节,便于改善系统。
至于远程安全员的提议,如果不拿出两者驾驶行为上生理、心理数据来讨论,很容易陷入口舌之争。
车联网是否有助于自动驾驶车辆的安全
车联网技术在全球已进入大规模商用阶段。完全自动驾驶车辆没有明确的时间表,协同智能交通系统(C-ITS)已在一些国家的智慧城市建设重要路网进行了有限的投资建设。随着达到成熟并商用,这些技术的相互融合,也是可预料的。不过,一些原则仍要清楚。
譬如,完全自动驾驶车辆只能依赖自身能力运行,不能依赖任何实时在线技术支持。也就是说,自动驾驶车辆无需依赖车联网、智能交通系统的支持就可独立运行,甚至是不能依赖车联网、智能交通系统。
这个原则至关重要,也是这个行业的共识。这只需简单证明。譬如,即便再过一百年,世界上也还会有超过一半的道路,是得不到车联网通信或C-ITS支持的,它们仍是自动驾驶车辆需要独立前往的道路。独立完成自动驾驶,是自动驾驶车辆成立的前提。
如果上述逻辑成立,就意味着自动驾驶车辆的安全性不依赖于车联网。车联网也许有助于自动驾驶车辆的安全,但其作用绝对不是决定性的。这就好比一个人读书好,主要取决于个人有多认真勤奋,而非买了多少本参考书。
不过,对车联网、协同智能交通系统、自动驾驶车辆三个概念,当前的传播上出现了很大程度的混淆。这可能与当前的两个重大困境有关。
其一,中国车商要向高端发展的困境;其二,一些工程技术积累不能指导问题解决。对这两个困境的讨论,展开会有很大篇幅,此处只做简单讨论。
讨论自动驾驶车辆时,如果不落到具体应用,而处于空泛的背景之中,就会导致概念混淆。这十年来,许多车商已将一些自动驾驶技术落到商用,并增加了车辆附加值,譬如车道保持辅助系统、车距保持和跟车辅助系统、自适应巡航控制、自助停车等,新的自动驾驶技术很快也会在新车上商用,譬如自动换道辅助系统、交通拥堵辅助系统等。这些是自动驾驶的组成部分,也是车辆的安全技术。
这些已商用的自动驾驶技术具体应用并未依赖车联网和C-ITS。有什么理由说,自动驾驶车辆会需要车联网和C-ITS呢?
自动驾驶成熟过程,实质是拟人化过程。这也是安全员之所以至关重要的原因。拟人化过程,是根据安全员的具体判断改进每个发生的细节。机器与人相比,优势是一次改进就永不犯错、可全面发现环境信息且计算快等,但在判断决策上仍需模拟人的思维模式。这个思维过程叫人因,已在交通安全领域发展多年,不仅可用于自动驾驶,还一直用于道路、车辆的设计和驾驶人的培训。
这些技术一直存在,也在不停发展。我们的研发者了解这些吗?
技术发展都有其历史和内在逻辑。安全员的存在是自动驾驶技术发展的必经过程。这个岗位的出现或消失,也有其科学逻辑。如果要以取消安全员作为跻身自动驾驶领域第一梯队的象征,那既缺乏工业化的思维,也缺乏对市场、科学和公众的尊重。























