


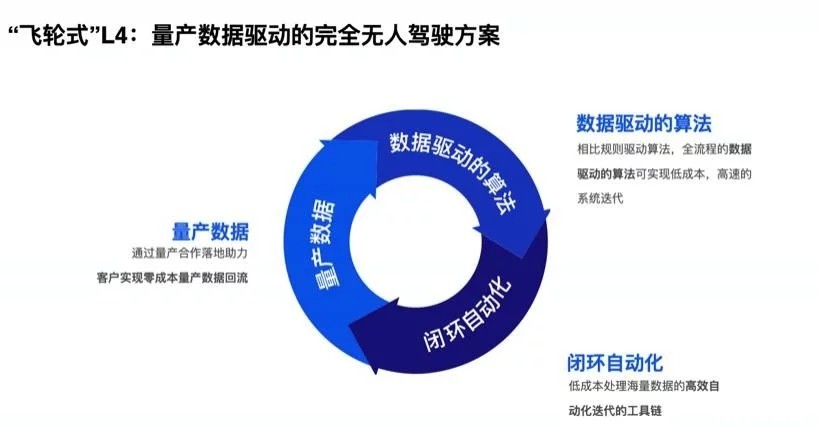
“飞轮式”L4,指随着量产数据、数据驱动的算法以及两者闭环自动化的不断积累和迭代,飞轮将越转越快,终成厚积薄发之势,带来产品和商业的爆发增长,最终实现无人驾驶规模化落地。
“公司内部有一个飞轮、两条腿、三大法宝的说法。一个飞轮是Momenta创立之初就坚定的对无人驾驶的技术洞察;两条腿是产品战略,已经在去年发布;公司内部还有实现产品化的三大法宝,会在后续做更多公布。”Momenta CEO曹旭东表示。Momenta的两条腿产品战略,左腿量产自动驾驶Mpilot,为行业交付一流可量产的自动驾驶系列产品,并提供源源不断的数据流;右腿完全无人驾驶MSD,致力于打造L4级别的完全无人驾驶,并反馈给量产产品领先的技术流。两条腿战略需要建立在统一量产传感器基础及统一的技术路线上,两者相互协同打通。
规模化L4面临“行驶千亿公里,解决百万问题”的巨大挑战。千亿公里,相当于地球到太阳系尽头行星距离的22倍。“千亿公里这个目标非常宏大,如果要用无人驾驶实现‘星际穿越’,必须给它们安上强有力的'飞轮'。”曹旭东说,“同时实现规模化L4要解决上百万的长尾问题,我们的员工不是见招拆招的单一问题解决者,而是架构师,使用数据驱动的方式,架构自动化解决问题的系统。”
“飞轮式” L4厚积薄发,一镜到底全程展示技术进展
同行业其他路线相比,“飞轮式”L4优势在于厚积薄发,为L4技术赋能,大幅度提升研发效率。举例而言,公司从2019年中开始重点投入L4研发,到L4技术于当年年底发布,仅以常规团队1/10的规模,用时半年即做到在包含如临时施工、多种不规则车辆、逆行横穿等各种复杂城区开放道路行驶过程中的全程无接管。继去年年底首次公布其路测进展后,Momenta本次更是公布了其一镜到底包含全程中间技术结果的晚高峰路测视频。
重新定义规模化无人驾驶,通过“飞轮式”L4跨数量级降低成本
“自动驾驶的终局一定是规模化的完全无人驾驶,以Robotaxi落地为例,规模化L4指的不是一个区域或城市,而至少是路况复杂的十个城市,每个城市至少一万辆车,否则难以称之为商业化落地。”曹旭东表示。
人类司机的驾驶水平约为一亿公里出现一次致命事故,要实现规模化L4,至少要做到人类司机的安全水平,最好可以比人类司机水平高一个数量级。因此,需要进行至少千亿公里的测试,解决百万长尾问题。千亿公里意味着100万辆车,每天10个小时不间断运行,连续跑1年。
如何计算规模化L4的总成本?Momenta内部采用“飞轮公式”来计算这一成本。即实现规模化L4的总成本可分为数据成本和研发成本。
具体而言,研发成本取决于问题个数(N)和解决单个问题研发成本(R);数据成本取决于里程数(M)和单公里数据成本(D)。
由于实现规模化L4还处在“无人区探索”的状态,因此无法准确评估问题个数(N)和里程数(M)的大小,但可以肯定,N至少达到百万量级,M至少是千亿公里。
和行业现有路径相比, Momenta以量产数据驱动的方式,能够跨数量级地降低解决单个问题的研发成本(R)和单公里数据成本(D)。
在单个问题研发成本(R)方面,常规规则驱动(Human-Driven)的最大挑战是用有限人力解决上百万个问题。而通过量产数据驱动(Data-Driven)的方式,只要收集到足够的数据,就可以自动化地解决绝大部分问题,从而降低研发成本。
在单公里数据成本(D)方面,目前行业自建车队费用不会低于打车费用。现在打车费用国内通常在2-4元/km,国外会更贵。如果是千亿公里,自建车队至少是2000-4000亿的成本。而在“飞轮式”L4中,Momenta一方面为客户提供量产自动驾驶解决方案,另一方面也提供持续的软件算法迭代升级。在为客户解决问题、创造价值的过程中,和客户一起回收了长尾问题的数据,把单公里数据成本降到了几乎为零。
因此,通过“飞轮式”L4,Momenta将实现规模化L4的总成本跨数量级降低。
飞轮三因子:量产数据、数据驱动的算法、闭环自动化
飞轮因子1:量产数据
规模化L4的最终实现,要有千亿公里的数据以发现长尾问题。如此海量的数据规模,需要通过量产自动驾驶去实现。Momenta通过将量产自动驾驶产品Mpilot搭载在车辆上,在为客户解决问题、创造价值的同时,回收海量数据,助力客户更好的迭代产品。这些来自真实世界的海量量产数据,就像“活水”一样,源源不断地进入“飞轮式”L4的循环中,推动MSD不断升级,使得完全无人驾驶系统不断进化。
飞轮因子2:数据驱动的算法
规模化L4的最终实现,要解决真实场景中的海量问题,必须通过数据驱动(Data-Driven)的算法才能高效解决。基于规则驱动(Human-Driven)的常规算法框架,可以用100个人的团队一年的时间解决100个问题,但是不可能有100万个人在一年的时间里去解决100万个问题。唯一的可能性,就是通过数据驱动的方式,自动化地解决绝大部分的问题。
Momenta内部推行“架构师”文化,相比于见招拆招的解决单一问题,公司鼓励团队把更多的精力放在如何搭建一套数据驱动(Data-Driven)的算法框架上。随着量产数据的不断流入,数据驱动的算法会驱动飞轮式L4不断迭代,自动化地解决自动驾驶的长尾问题。
飞轮因子3:闭环自动化
规模化L4的最终实现,要量产数据和数据驱动的算法之间形成自动迭代的闭环,闭环自动化正是这样一套高效、自动化的工具链:通过建立对问题自动化发现、记录、标注、训练、验证的闭环过程,为技术和产品提供自动化的迭代能力,驱动“飞轮式”L4高速转动。
打造“飞轮速度”,2024年做到单车盈利
随着“飞轮式”L4开始转动,Momenta的研发效率也得到了显著提升。目前Momenta在环境感知、高精地图、预测等环节,已实现了完全数据驱动,并通过闭环自动化持续迭代升级。预计到2022年,Momenta可以实现全流程数据驱动的算法;到2023年,利用闭环自动化实现算法100%自动化迭代。
正如“飞轮式”L4的描述,前期需要花更多精力让飞轮转起来,持续建设“飞轮三因子”。2024年,量产自动驾驶Mpilot已经大规模量产上路,为用户使用。Mpilot将为行业交付一流可量产、可不断升级的自动驾驶系列产品,并通过大规模量产数据流,赋能完全无人驾驶MSD。Mpilot和MSD将协同增效,实现“飞轮式”L4的快速成长。
Robotaxi是“飞轮式”L4的重要商业化落地场景。Momenta已于今年6月取得苏州第一块Robotaxi示范应用牌照,并计划在2022年,做到苏州Robotaxi部分车辆车端无安全员试运营;2024年,车端100%无安全员,实现单车盈利;从2024年开始,结合已经回流的大规模量产数据,Robotaxi将实现多地规模化落地运营。
“在一个城市先实现单车盈利,再复制到其他城市,是无人驾驶规模化落地的最精益的模式。”曹旭东表示,“对于Momenta而言,这个转折点出现在2024年。一方面,随着”飞轮式”L4的发展,2024年Momenta将在苏州实现车端完全无安全员的商业运营,从而降低车辆运营成本,实现单车盈利,完成商业模式0-1的验证。另一方面,2024年随着量产车型大规模上市,量产数据大规模回流,此时数据和技术上1-N的储备也已到位,具备了扩张条件。Momenta 将开始进行多地落地,从而以极快的速度实现规模化L4。”






















