


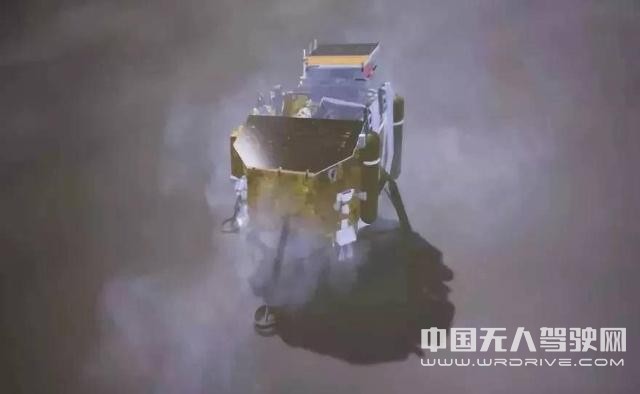
2019年1月3日10时26分,嫦娥四号探测器自主着陆在月球背面南极-艾特肯盆地内的冯·卡门撞击坑内,实现人类探测器首次在月球背面软着陆。

记者从中国航天科技集团五院了解到,相比嫦娥三号,嫦娥四号的落月难度更大。一方面,嫦娥三号着陆区地形起伏仅800米,堪称“平原”;而嫦娥四号着陆区地形起伏达到6000米。更重要的是,嫦娥四号与地面交流需要通过鹊桥中继卫星中转,其间会产生约60秒的延时,这对于瞬息万变的降落过程显然太久。因此落月全程需要由它自主完成。
GNC系统控制落月全程
嫦娥四号的成功落月,将我国航天器制导、导航与控制(GNC)技术提升到了新的高度。
由五院502所研制的GNC系统,负责嫦娥四号奔月、环月、落月整个过程的控制,特别是近月制动和落月的过程,没有重来的机会,对系统可靠性有着极高要求。
地形崎岖使得此前嫦娥三号的飞行轨迹无法适用,不可见又导致关键阶段地面支持能力有限。在充分研究月面预定着陆区地形特点基础上,502所科研团队设计了适应新地形的落月轨迹方案。为减少对地面的依赖,他们修改了原有设计,大大提高了系统的稳定性和在危急状况下的生存能力;同时完善了故障应对措施,将原本依赖人工处理的故障预案全部放手交给着陆器自行决断,大大提高了故障应对速度。
测距测速传感器提供精确信息
正如我们开车时需要行车雷达和倒车雷达辅助,引导嫦娥四号落月的GNC系统也需要各种探测器提供测量参数。五院研制的测距测速敏感器,通过精确把握速度和距离信息,为嫦娥四号安全降落提供了支持。
根据嫦娥四号着陆环境的特点,科研团队对此前嫦娥三号的测距测速敏感器进行了升级和优化。为此他们多次开展吊车试验和校飞试验,通过模拟的方式验证传感器性能是否满足需求。
嫦娥四号探测器巡视器(左)、着陆器(右)、中继星“鹊桥”(上)示意
等来落月指令后,嫦娥四号按照GNC系统的指挥,在距离月面15公里高度“定时定量”启动发动机开始减速,在边飞边降的同时迅速调整姿态。在距离月面8公里时,嫦娥四号变为垂直下降,直至最后100米。为了保证着陆时不会掉进坑里或踩到石头,它悬停在空中缓了口气,待选定落脚点后,才缓缓“飘”了下去,整个过程大约耗时10分钟。
着陆缓冲机构防止落地时“闪腰”
虽然嫦娥四号不怕黑、不恐高,却担心在着陆瞬间“闪了腰”。为此五院给它研制了4条强有力的“腿”,不仅能让它稳稳着陆,还能有效吸收着陆时产生的冲击力,防止它身上的设备被震坏。

嫦娥四号着陆器
嫦娥四号的腿学名叫“着陆缓冲机构”。每条腿都包含1个主腿和2个副腿,各有分工。着陆前,副腿推着主腿向外侧展开,锁定在规定角度;主腿负责在着陆时安全支撑、吸收冲击力。为了在减轻重量的同时保证强度,主腿和副腿的外壳被设计成又长又薄的圆筒,采用了强度极高的铝合金材料,其中还填充有缓冲蜂窝材料。研制期间,五院技术人员攻克了多项工艺制造难题。
在嫦娥四号的腿上,还长着脸盆一样的圆形大脚掌,这种设计可以更好地防止它在着陆时摔倒。大脚掌外观简单,内部构造却十分复杂。其中央装有一个形状特别的金属结构,如同足弓,可以有效分散冲击力。脚掌里还填充了致密的蜂窝材料,以起到缓冲作用。






















