


经过一个多世纪的发展,汽车以其特有的优越性飞速发展,汽车保有量直线上升。但是,人们在享受汽车带来便捷的同时,也面临着严峻的交通问题。因此,智能车辆的研究如雨后春笋般在世界各国开展起来。
基于机器视觉的车道线检测识别是智能车辆辅助驾驶系统的关键技术之一。车道线检测就是从摄像头获得的图像中,将车道线与背景进行分离,从而获得车道线的走向等信息[1]。目前国内外已经提出了许多车道线的检测识别方法,早期的一些简单算法主要利用车道线固定且颜色明显(如黄色和白色)对车道线进行识别,往往有很大的局限性;后来的复杂算法抗干扰能力强,但是处理速度及实时性较差。因此,如何准确、快速地检测识别出车道线已成为智能车辆辅助驾驶系统的一个重要问题。针对道路特点以及对车道线识别的准确性和鲁棒性等要求,本文主要对图像分割(二值化)过程中的3种算法进行对比,得出效果较好的最大类间方差的算法;在边缘检测过程中对Sobel算法进行改进[2];在车道线识别的过程中应用了霍夫变换[3],有效准确地对车道线进行识别。
1 道路图像预处理
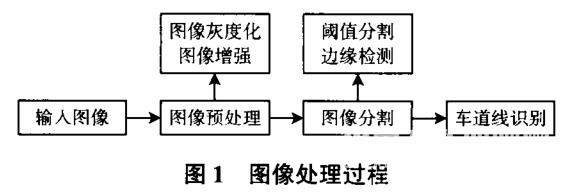
采集到的道路图像的处理过程如图1所示。输入图像后,首先对道路图像进行预处理,然后进行图像分割,最后对车道线检测识别。
采集道路图像时,受到外界因素的影响,获取的图像无法完全体现原来图像的所有信息,所以必须首先对道路图像进行预处理,达到抑制无关信息、改善图像质量、提取感兴趣部分以及突出本文所需要的车道标志线信息等效果。
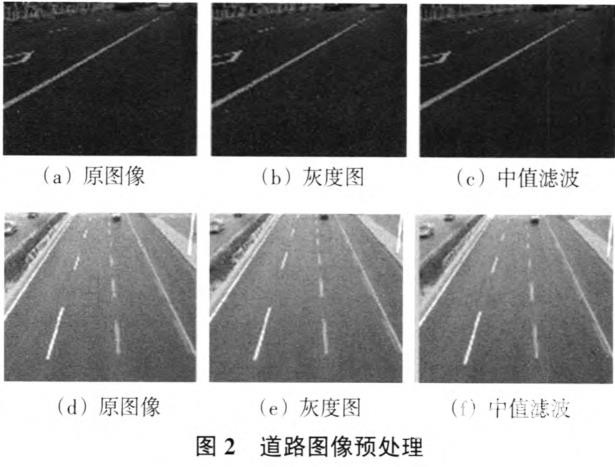
对于机器视觉(车载相机)获取的道路图像,预处理一般分为道路图像灰度化、道路图像去噪以及图像滤波增强等方式。本文采用加权法对图像进行灰度化,用中值滤波对图像去噪,图像预处理后的实验效果图如图2所示。
2 道路图像阈值分割
本文对道路灰度图像主要采用阈值法分割,即将图像二值化,选择一个合适的阈值,将原始的图像转换成黑白二值图像。灰度阈值分割法的处理函数为:

式中:f (x,y)为原始图像中的像素值;g(x,y)为处理后的黑白图像的像素值。灰度阈值分割法是一种非线性运算,其函数图如图3所示。

本文研究灰度图像二值化的3种自动阈值算法。一般自动选取阈值可以使处理后的图像达到稳定可靠的效果。
2.1迭代法阈值分割
迭代式阈值选择方法的基本思想是开始选择一个阈值作为初始估计值,然后按照某种规则不断地更新这一估计值,直到满足给定的条件为止[4]。下面是一种迭代算法:
(1)选择图像灰度T作为初始估计值。
(5)重复步骤(2)至步骤(4),直到逐次迭代得到的T值小于先前定义的参数T值。
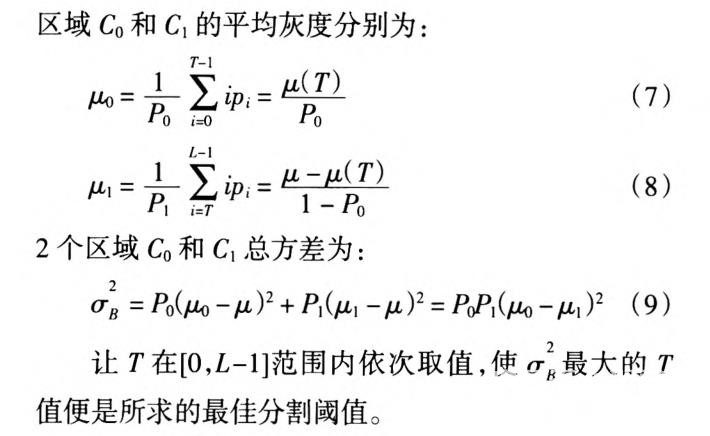
2.2最大类间方差法(OTSU法)
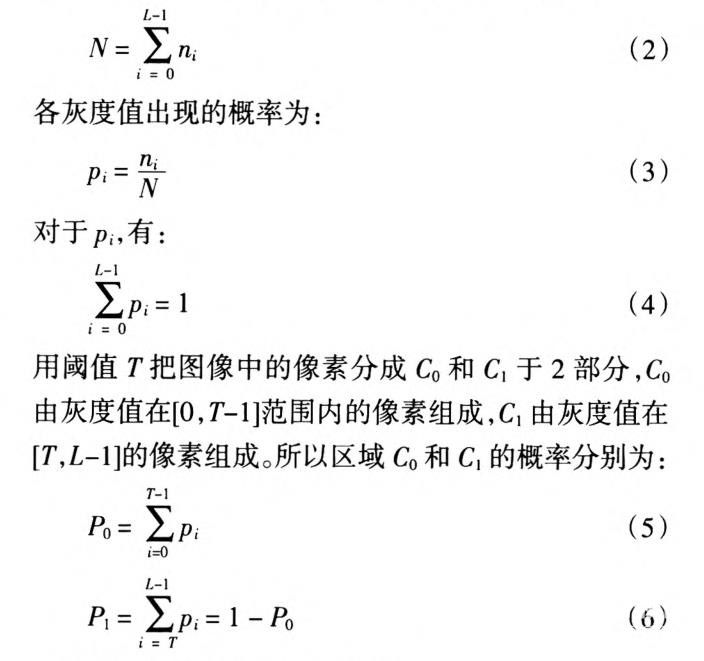
最大类间方差法[5] (又称大率法)是一种使类间方差最大的自动确定阈值的方法,该方法具有简单、处理速度快的特点[6]。其思想为设图像中灰度值为i的像素数为ni灰度范围为[0,L-1],则总的像素数为:
2.3分水岭算法
分水岭算法是一种应用了形态学理论的分割方法,其核心思想是将一幅图像看成一个拓扑地形图,将灰度值f(x,y)定义为对应地形高度值,其中高灰度值代表着山峰;低灰度值代表着山谷。水总是朝地势低的地方流去,直到在局部低洼处停下来,冈此称这个低洼处为吸水盆地。全部的水分聚在不同的吸水盆地,吸水盆地之间的山脊叫作分水岭。水从分水岭流下来,朝不同吸水盆地流去的概率是相等的。将这种思想应用于图像阈值分割,等于在灰度图像中找出不同的吸水盆地和分水岭,完成阈值分割,这种算法被称为分水岭算法。分水岭算法的分割原理示意图如图4所示。阈值分割的3种算法性能比较效果图如图5所示,3种算法进行阈值分割实验所用的时间如表1所示:
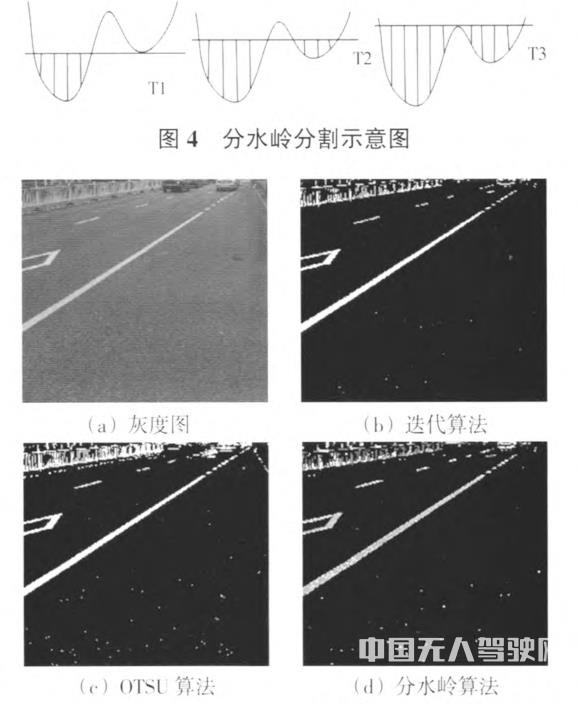
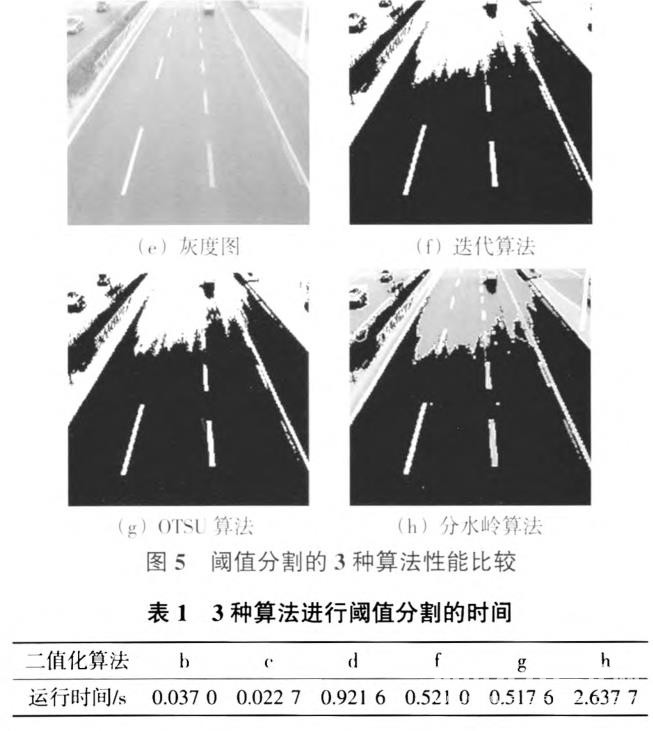
图5对3种阈值分割方法进行了比较,可以看出,迭代法阈值和最大类间方差法阈值的效果较好。从表1也可以看出最大类间方差法处理图像速度更快,所以本文采用最大类间方差法对图像进行二值化,以此得到比较理想的效果。
3 道路图像边缘检测
道路图像边缘检测算法有Roberts算子、Log算子、Prewitt算子、Canny算子和Sobel算子。其中Sobel边缘提取算法在图像空间上易于实现,可以平滑噪声,能够提供较为准确的边缘信息。
3.1经典Sobel算子
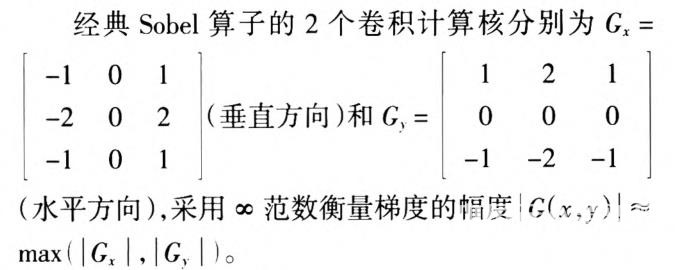
3.2改进的Sobel算子
道路图像中的车道线具有斜直线性特征,最强边缘方向接近正负45度,所以本文采用改进的算子模板来进行边缘提取,模板如图6所示。经典Sobel算法和改进算法的实验效果图如图7所示。
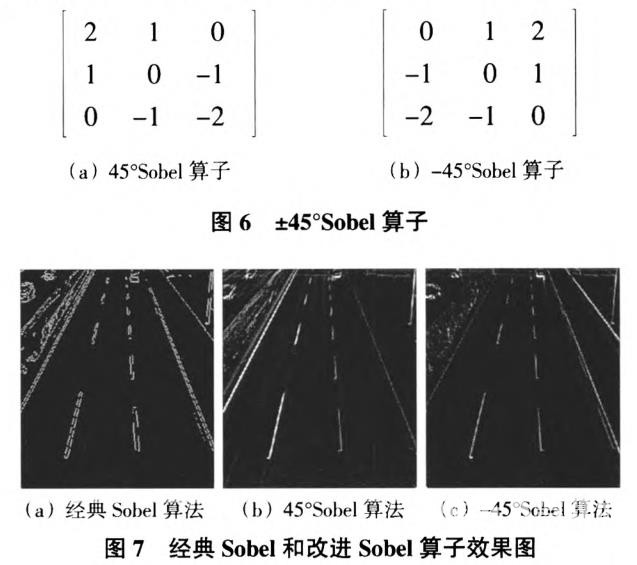
比较图7(a)、(b)和(c)可以看m,采用经典Sobel算子可以增强车道线的边缘,减少路面等干扰因素,但是车道线两侧边缘增强增加了识别的难度;改进的Sobel算法只是增强了车道线的内侧,容易识别,也保证了精度。所以本文采用改进的Sobel算法对车道线进行边缘提取。
4 基于霍夫变换的车道线识别
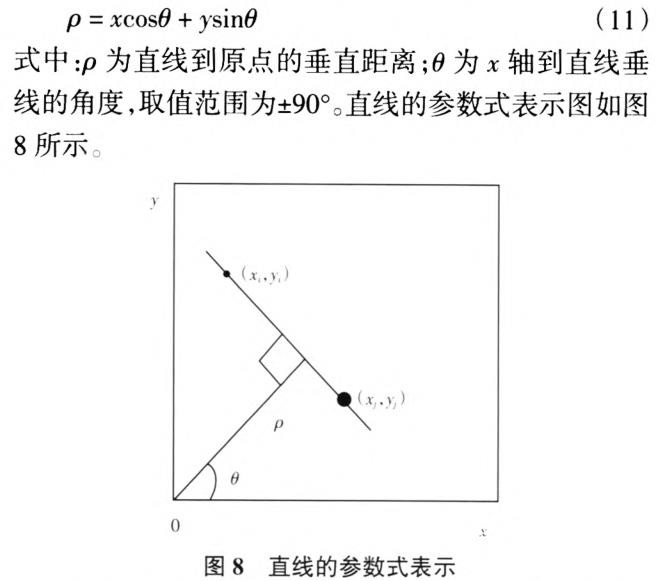
霍夫变换是一种非常重要的检测间断点边界形状的方法,它通过将图像坐标空间变换到参数空间来实现直线和曲线的拟合。本文主要研究结构化道路[7]中直线车道线识别。在极坐标中用参数方程表示一条直线
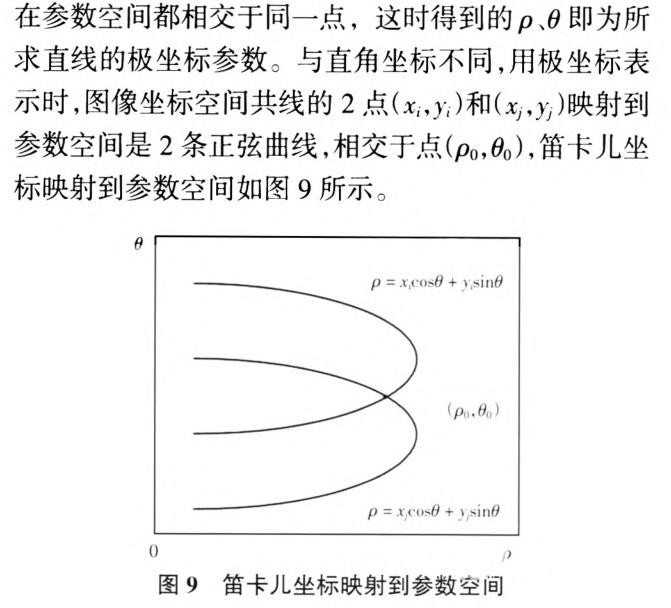
与直角坐标类似,极坐标中的霍夫变换也把图像坐标空间中的点变换到参数空间中。用极坐标表示时,图像坐标空间中共线的点映射到参数空间以后,在参数空间都相交于同一点,这时得到的P、θ即为所求直线的极坐标参数。
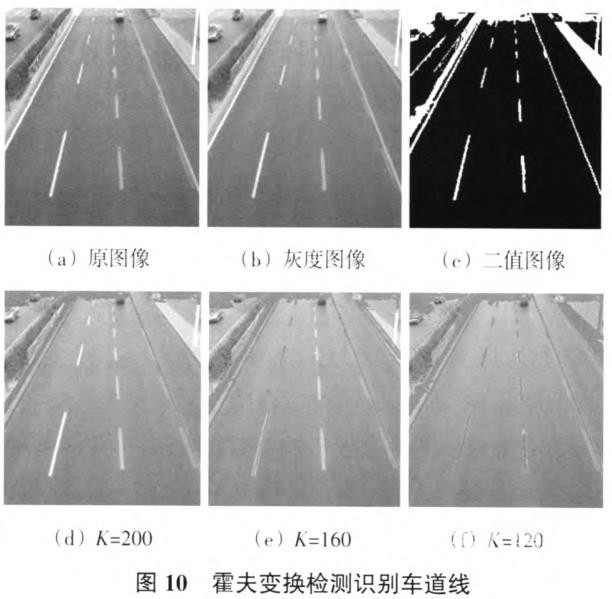
经过霍夫变换检测出的车道线图像如图10所示。设提取直线时得阈值为K,由图10可以看出,提取直线的阈值越大,无关细节也会减少;提取直线的阈值越小,无关细节也可能增加。通过对阈值的适当调节可使提取直线的效果更好:
5 结束语
本文主要针对结构化道路对比了二值化的3种算法,最终得m效果较好的OTSU算法;在经典Sobel算法的基础上做了改进,得m了改进的Sobel算法;采用霍夫变换的检测方法对车道线进行识别,取得了较为理想的效果。但是对于路面上存在严重干扰或者非结构化道路的情况,这种方法的车道线识别准确度还有待提高。
参考文献:
[1]许宏科,秦严严.一种基于Hough变换的车道线检测新方法[J].徐州丁程学院学报,2013(4):1—4.
i2]侯利龙.高速公路车道线检测算法研究[D].郑州:河南工业大学.2012.
[3]侯立龙,狄帅.直线模趔下的高速公路车道线检测方法研究[J].清远职业技术学院学报,201 1(6):73—76.
[4]张铮,倪红霞,苑春苗,等.精通Matlab数字图像处理与识别[M].北京:人民邮电}lj版社.2013.
[5] 吴一全,潘赫.2维最大类问平均离差阈值选取快速递推算法[J].中国图象|j2.|彤学报,2009,14(3):471—476.
[6]张德E数字罔像处理[M].北京:人民邮电出版社,2009.
[7]CHENG H Y,Y C C,TSENG C C,et al.Environmentclassification and hierarchical lane detection for structured and unstructured roads[J].IET Computer Vision,2010,4(1):37-49






















