


在美国国家公路交通安全管理局美国运输部(NHTSA)近日发布了对自驾车技术的当前状态的概览报告。
根据该报告,自动驾驶汽车技术仍处于研发阶段。下面给出的地图描绘了美国的受控测试地点,这些地点使用建模,仿真和道路上的自动驾驶汽车组件和系统。
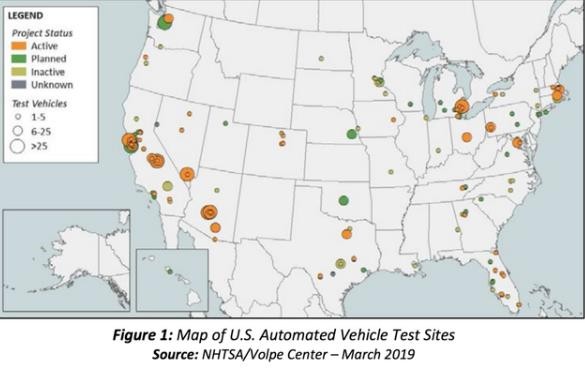
资料来源:美国国家公路交通安全管理局
本文旨在提供有关自动驾驶和自动驾驶汽车目前在现实世界中的运行方式(从硬件到软件)的基本信息和入门信息。
我们将本文分为三个部分:
什么构成无人驾驶汽车(自动驾驶级别)
自动驾驶汽车如何与彼此及其周围环境互动
Google的Waymo和Tesla的Autopilot如何运作的最新示例
我们将从检查自治级别开始:
无人驾驶汽车的自主程度
根据SAE International的说法,自动驾驶汽车具有五个级别的自主权:
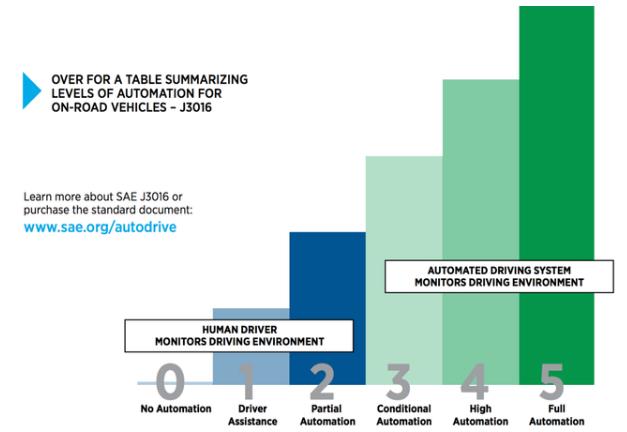
资料来源:SAE International
级别1:这是系统和操作员共享控制权的低级别自动化。例如,自适应巡航控制功能控制发动机和制动功率,以实现速度变化和维护,而驾驶员则控制转向。1级系统可能需要随时进行全面的人为控制。
级别2:在此级别上,虽然系统控制着车辆操作(例如加速,制动和转向),但需要驾驶员对自动驾驶系统进行持续监控。许多2级车辆要求驾驶员握住方向盘,以使自动驾驶系统持续运行。
级别3:属于此类别的自动驾驶汽车允许驾驶员执行其他任务(例如发短信或看电影),而系统则控制了大多数汽车的运行。但是,对于车辆制造商指定的某些操作,该系统需要驾驶员在有限的时间内进行干预。
级别4:该级别支持自动驾驶,而驾驶员的干预最少,但它仅在选定的,称为地理围栏区域的地图位置中支持。
级别5:不需要人工干预。
尽管5级自治是许多自动驾驶汽车公司的共同梦想,但它们各自达到5级自治的途径却大不相同。一些公司认为3级和4级自治太危险了,因为从机器到人的交接可能是不可预测的并且是危险的(从发短信或看电影转向摆脱事故可能是不切实际的期望)。
无人驾驶汽车如何与周围环境互动
根据美国运输部的说法,互联和自动驾驶车辆可以通过三种方式相互通信及其周围环境:
车对车(V2V)交互
自动驾驶汽车之间的V2V交互允许在路线,拥堵,障碍物和危险方面进行信息交换。
例如,如果自动驾驶汽车遇到事故或交通流量大但行驶缓慢的情况,它可以将信息中继到其他自动驾驶汽车,后者可以根据接收到的数据调整其路线,并有可能避免事故和交通。
车辆到基础架构(V2I)交互
自动驾驶汽车可以与基础设施组件(例如智能停车系统)进行通信,以计划路线并在旅程开始之前预留停车位。
该信息在自动驾驶汽车必须确定到达目的地(平行,垂直或成角度)时如何停车时特别有用。此外,其他无人驾驶汽车会提前“知道”特定的停车位是否已经预留或开放。
车辆到行人(V2P)交互
该V2P相互作用主要是进行自驾车和行人的智能手机应用程序之间。
据明尼苏达大学(University of Minnesota)称,它资助了一个名为“移动无障碍行人信号”(MAPS)的V2P原型。视觉受损的行人可以使用MAPS分别接收和提供有关交叉路口和行人位置的信息。然后,自动驾驶汽车将使用这些数据以及汽车传感器和LiDAR提供的数据,以更准确地定位行人并可能避免碰撞。
当前无人驾驶汽车和工作部件的例子
谷歌和特斯拉是当前自动驾驶汽车领域最大的参与者。为了更好地了解自动驾驶汽车的实时工作原理,本文详细介绍了Google的Waymo和特斯拉的Autopilot的运作方式。
谷歌的Waymo
根据Google的说法,Waymo是4级自治系统,需要最少的人工干预。
Waymo的硬件基础架构
下面提供了Waymo硬件的描述性图像:
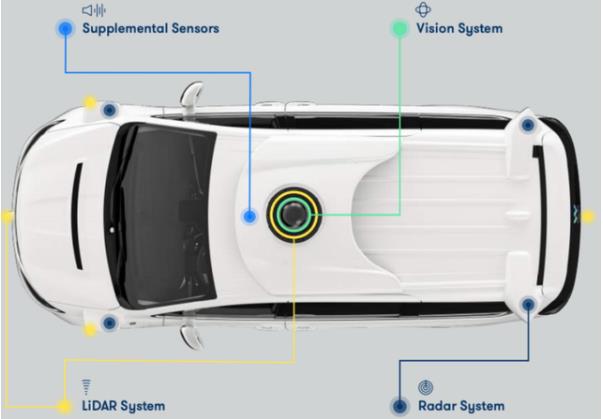
Waymo的基础设施包括各种传感器,雷达和摄像头系统。
激光雷达传感器
根据Google的说法,Waymo具有能够在不同照明条件下运行的多层传感器套件。该传感器套件本质上是一种全向LiDAR系统,包括短距离,高分辨率中距离和远程LiDAR。这些激光雷达每秒投射数百万个激光脉冲,并计算光束从表面或人身上反射并返回自动驾驶汽车所需的时间。
据报道,Waymo基于从LiDAR光束接收的数据,创建了周围环境的3D地图,识别了移动和不固定的物体,包括其他车辆,骑自行车的人,行人,交通信号灯和各种道路特征。
视觉系统
Waymo的视觉系统是另一套全向高分辨率相机套件,据称能够在弱光条件下识别颜色。这有助于检测不同的交通信号灯,其他车辆,建筑区域和应急灯。
雷达
Google称Waymo使用雷达系统通过波长在不同的光和天气条件(例如雨,雪和雾)周围“行进”来感知物体和运动。该雷达系统也是全向的,可以在自动驾驶汽车周围360度跟踪行人和其他车辆的速度。
辅助传感器
Waymo还补充了额外的传感器,这些传感器包括用于检测紧急警报的音频检测系统和用于跟踪物理位置的GPS。
Waymo的自动驾驶软件
谷歌声称Waymo的自动驾驶软件已经基于“ 50亿英里的模拟驾驶和500万英里的公路驾驶体验”进行了培训和测试。它由机器学习算法提供支持。
根据Google的说法,Waymo的4级技术可以检测和“理解”物体及其行为,并通过三方面的过程来调整自动驾驶汽车的行为。
感知
据报道,Waymo可以检测,识别和分类道路上的物体(包括行人和其他车辆),同时随时间测量其速度,方向和加速度。
例如,Waymo的感知软件从传感器和雷达收集数据,并创建周围环境的模拟“视图”。由于此功能,Waymo能够确定路灯变绿时,路灯变绿时是否可以继续通过交通,或通过交通锥指示的阻塞车道来调整路线。
行为预测
根据Google的说法,Waymo可以根据物体的分类来预测物体在道路上的行为,方法是从使用“数百万英里的驾驶经验”构建的训练模型中推断数据。
例如,自动驾驶软件“理解”,尽管行人看上去与骑自行车的人相似,但他们的行进速度比骑行者慢,并且方向变化更为突然。
规划
据报道,规划器软件使用感知和行为预测软件捕获的信息来规划Waymo的适当路线。谷歌称,Waymo的计划者的运作就像一个“防御性驾驶员”,他选择远离盲区,并为骑自行车的人和行人留出余地。
特斯拉的自动驾驶仪
根据特斯拉的说法,自动驾驶仪是2级自动驾驶汽车的功能。与大多数2级系统一样,自动驾驶仪要求驾驶员始终握住方向盘,以接管控制权。
特斯拉还警告说,驾驶员在自动驾驶过程中必须具有充分的功能和意识。
自动驾驶仪硬件
下图显示了自动驾驶仪的硬件组件。

资料来源:特斯拉
据特斯拉称,其2014年至2016年10月之间生产的自动驾驶汽车包括有限的超声波传感器,低功率雷达和仅一个摄像头。
自2016年以来建造的设备包括12个用于附近物体和行人识别的超声波传感器,能够“感应”不同天气条件的前置雷达,八个用作特斯拉内部神经网络馈送信号的外部摄像头以及处理输入的计算机系统以毫秒为单位。
特斯拉联网汽车软件不断进行“空中更新”。
自动驾驶软件
交通感知巡航控制系统,可根据周围交通情况保持速度。
驾驶员在标记清晰的车道内进行“自动转向”
自动车道变更,可在车道之间转换
驾驶员辅助的“自动驾驶导航”,用于指导车辆从高速公路的匝道驶入匝道,包括建议和更改车道,导航高速公路交汇处和驶出出口。
自动停车,可自动平行或垂直停车
召唤从停车位“呼唤”汽车
下面简要说明了上述功能的工作原理:
在自动驾驶仪上导航
“自动驾驶导航”功能使驾驶员可以将目的地输入到车辆的导航系统中,从而启动显示计划路线的“ 360度可视化”。出于安全原因,每次旅行都必须启用此功能。据特斯拉称,它无法在默认模式下运行。
自动换道
“在自动驾驶仪上导航”功能包括两种类型的车道变更:基于路线和基于速度。前者允许车辆不顾速度而坚持导航路线。后者基于一些设置,建议以设定的巡航速度为参考,将车辆过渡到比自动驾驶仪更快或更慢的车道。
当驾驶员选择退出换道确认通知时,自动换道进入模式。但是,特斯拉警告驾驶员,此功能不是完全自动的,需要全神贯注并按住方向盘。Tesla声称驾驶员可以随时手动覆盖此功能。
停车和召唤
当汽车以低速行驶时,驾驶员可以启动自动停车,以检测合适的停车位。这需要手动干预,使汽车倒退并按启动,但是,在汽车开始独立控制速度,改变档位和转向角之前。
当乘客想要“呼叫”汽车并通过一系列前进和后退按钮单击来引导汽车时,自动驾驶仪还具有通过应用程序触发的召唤按钮。
自治的障碍
在过去的五年中,无人驾驶汽车投资激增,但仍然存在许多重要挑战,难以实现5级自动驾驶:
发展中国家的道路规则 –加州的高速公路不同于开罗或班加罗尔的交通。除非开发出能够处理其独特情况和道路规范的自动驾驶系统,否则在自动驾驶汽车的采用方面(因此在安全性,更低的排放量和提高的工人生产率方面)可能会落后于发展中国家。在这些国家或“测试区域”中,这可能涉及对驾驶习惯和规范的重大改变,在这些区域中适用不同的道路规则并且可以对自动驾驶技术进行测试。
统一标准 –为了使车辆与自身或与基础设施进行通信,必须开发新的通信渠道。这些渠道应允许不同品牌和型号的车辆进行通信,并且应尽可能防止黑客入侵和欺骗。在美国和其他国家/地区努力推进这些标准的同时,还有许多工作要做,以确保安全并在车辆和基础设施之间建立统一的智能层。
安全阈值 – 2000年至2010年间,美国商业航空公司每乘客英里死亡人数约为每100亿乘客英里死亡人数0.2(维基百科)。可以肯定地说,自动驾驶汽车的标准将更加严格,但目前尚不清楚界限在哪里。不同国家的政府将必须确定可接受的死亡率,以及各种自动驾驶汽车的安全标准和指南。
天气和灾难 -暴风雪,洪水或街道标志和“ V2”技术损坏可能会使自动驾驶汽车面临严重错误和致命危险的风险。与在加利福尼亚州山景城在晴天将汽车停放在道路上相比,建设道路基础设施来应对灾难以及建造车辆来应对异常或不太理想的条件(可见性,轮胎牵引力等)要更具挑战性。






















