0 引 言
随着城市化进程的加速,交通问题已经成为大多数城市所面临的难题之一。无人驾驶车辆的研究可以极大地改变这一现状,因此在近年中得到各国的重视。智能车是集自动控制、机械设计、机器视觉、传感器、信息融合、人工智能等多种理论和技术于一体的交叉学科,对智能车领域的研究不仅对现代交通系统的发展着重要意义,在军事和工业方面也具有广阔的应用前景。
而对于道路可通行区域的检测是保障无人驾驶车辆安全行驶的最低保障。对于道路的检测,激光雷达具有很高的分辨率和精度、宽的扫描范围和相较于雷达低的成本,且在恶劣天气下的效果也在不断改善和提高[1,2]。因此,本文中使用激光雷达来进行道路可通行区域检测。使用激光雷达的道路检测方法可以根据提取出的道路特征进行分类:一类是障碍物检测方法,激光雷达朝车辆前方扫描,以提取出车辆、路标和护轨等[3,4];另一类方法是提取道路、道路标志(如车道线、路缘石等),这种情况下的激光雷达是朝车辆前方扫描,并带有一定的俯角[5,6]。
1 系统设计概述
1.1激光雷达安装
本设计中共使用3个激光雷达。其中2个斜向安装于车顶,用于检测道路边界;1个水平安装于车辆前方,用于检测障碍物。
激光雷达使用SICK公司的LMS291和LMS151。使用的角度分辨率均为0.5度,检测角度范围也都设为1800。车顶激光雷达如图1所示。

1.2坐标系
车辆与各传感器坐标示意图2。
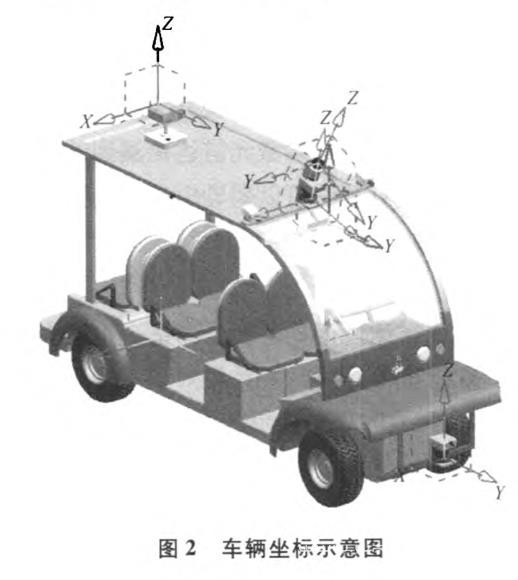
车辆坐标系的原点选择在车辆后轮轴的中点,X方向沿着车辆后轮轴向右,y方向沿着车辆轴线向前,z方向垂直于地面。各激光雷达坐标系坐标最后都投影到车辆坐标系下。2D的激光雷达提供的距离数据是在极坐标系下的,每一帧的距离数据可以看作是一个点集:
2 道路检测
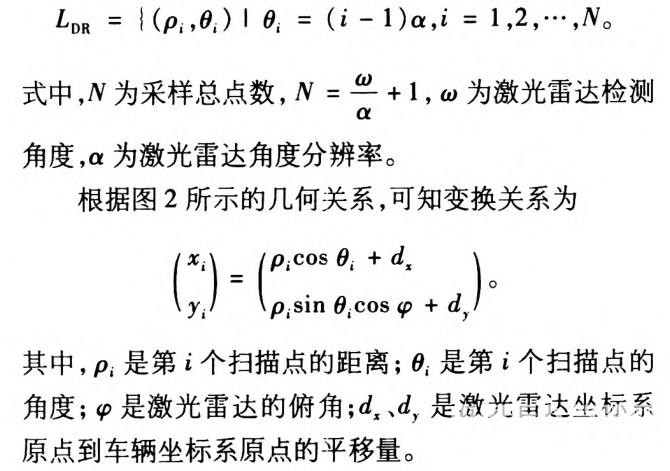
目前使用激光雷达的道路检测方法都是使用直线拟合。而在实际道路中,为了排水等因素,道路往往是中间高、两边低的弧形,而在一些较窄的道路上弧形尤为明显。在这样的情况下,使用直线拟合的道路检测方法显然并不能达到很好的检测效果。下面以我校电信群楼前道路为例,激光雷达扫描投影结果如图3。
图中,水平直线是假设道路为水平面时激光雷达应有的位置,可以很明显地看出道路本身不是一个水平面。直线拟合方法若是应用于此会得到很多段不同的线段,虽然可以通过加入某些先验约束来连接这些直线构成道路[7],但是依靠过多的先验假设会降低整个系统的鲁棒性;因此,本文将道路看作是一个曲面,转而使用二次函数拟合来求出道路曲面边界。从点集尺。中取出一个子序列,转换到直角坐标系后记为
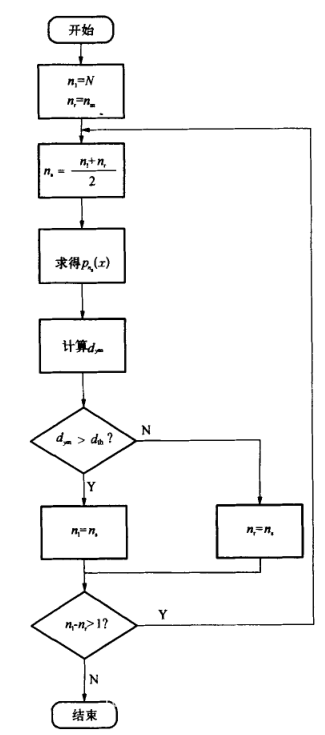
分别求出近端激光雷达检测到的道路边界点(xn1,yn1),(xnr,ynr)与远端激光雷达检测到的道路边界点(xf1,yf1),(xfr,yfr)后,可以勾勒出道路边界位置。
3 障碍物检测
3.1聚类
使用激光雷达进行障碍物检测是一种较为普遍的做法,很多研究机构和单位都对其进行了不少研究[6,8],本文采用的只是简单的聚类方法,即对坐标变换后的数据进行聚类,把障碍物分离出来。聚类依据首先是物理约束,即认为同一物体在激光雷达相邻两个检测点的差别不会超过一个阈值d1h即满足条件

则认为是同一物体。
3.2膨胀障碍物区域
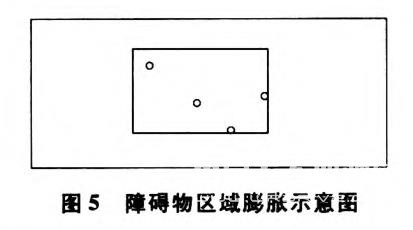
在获得障碍物的聚类结果后,由于车辆本身不是质点而是有宽度的,需要对每个障碍物进行膨胀,以防止出现误判,引起擦碰等事故。
本设计中使用的膨胀模型为矩形,即在最小可以包裹障碍矩形的基础上进行膨胀。考虑到安全性,x向膨胀为1.5 m(大于车宽的一半),Y向膨胀为0.5 m。见图5。
3.3无障碍区域检测
由车辆最小转向半径Rm可以得到车辆航向偏角极值
式中,L为车辆轴距。
在给定的安全距离dsafe如下,对区间为(-θm,θm)、半径为dsafe的扇形区域进行障碍物检测,排除所有有障碍物的区间,剩下1个可通行区域集合。
4 可通行区域融合
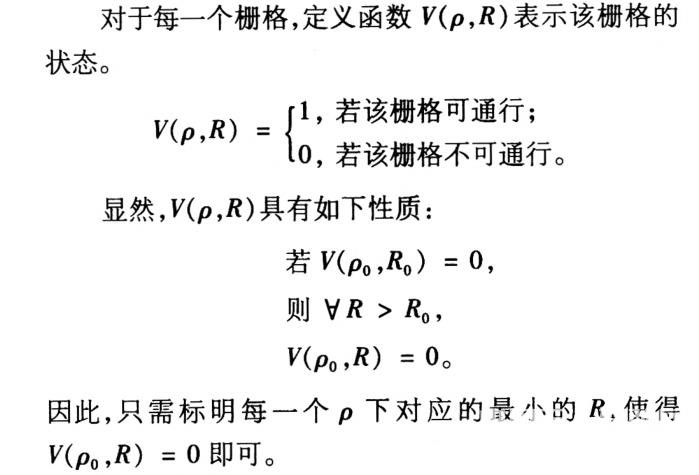
4.1可通行区域表示方法
对于道路可通行区域的表示方法,现在采用较多的是使用如图6所示的二维栅格来表示。
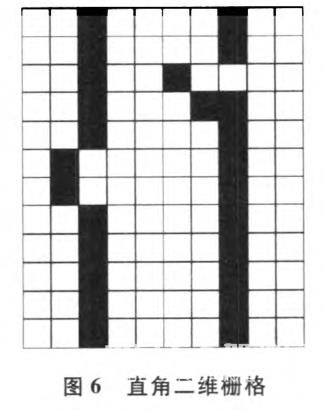
该方法与特征地图、拓扑地图以及直接表征法都是机器人学中常用的地图表示方法,用于建立地图的有效性无可厚非;但是用于实时表示车辆前方的可通行区域却不是最合适。根据车辆的机械结构我们可以知道,车辆的运动并不是由相互独立的横向运动与纵向运动构成的,而是由圆弧运动构成的,因此使用直角坐标系下的栅格地图并不是最合适的。
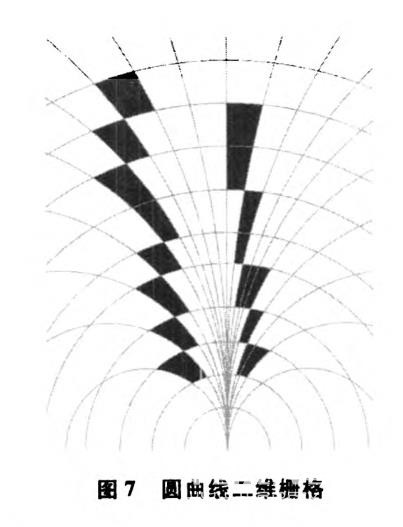
针对车辆运动轨迹特性,本文提出了一种基于圆曲线簇的变形栅格表示方法。栅格坐标(p,R)中,P表示点所在圆曲线半径,该圆曲线簇全部都是通过原点且以车辆正前方向为切线的圆曲线;尺表示点距离原点距离。该栅格示意图如图7所示。使用该栅格可以方便地得到任意距离下可行的转向半径。
4.2数据融合
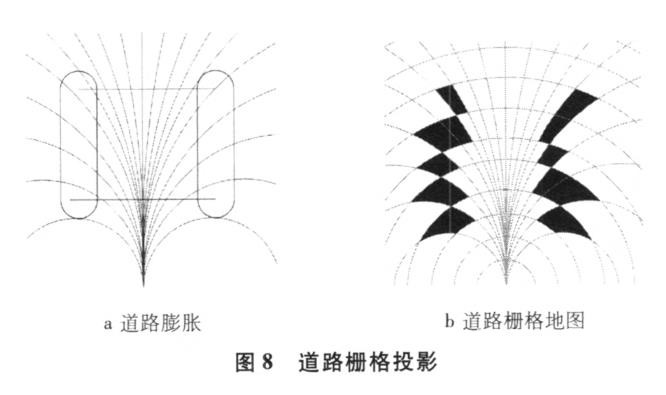
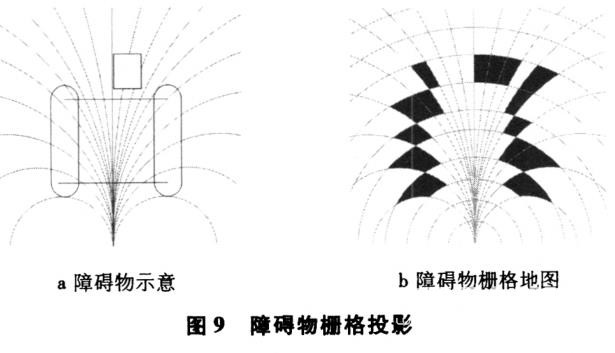
首先在栅格地图内勾勒出道路边界,使用上文中提到的方法可以由2个斜向激光雷达分别得到不同距离下的4个道路边界点:远端左边界(xf1,yf1)、远端右边界(xfr,yfr),近端左边界(xn1,yn1)、近端右边界(xnr,ynr)。连接左边界和右边界可以得到2条线段分别代表检测到的道路边界线。对该线段进行一定膨胀以保证安全性,再将该区域内的栅格点标记为1。道路膨胀如图8a所示,对应栅格地图如图8b所示。然后将前文中由水平激光雷达数据计算得到的障碍物加入栅格中,障碍物位置如图9a所示,加入后的栅格如图9b所示
5 实验结果
5.1道路边缘检测
(1)校内实验 图10a为普通道路检测结果,图10b为两侧有灌木丛道路的检测结果。
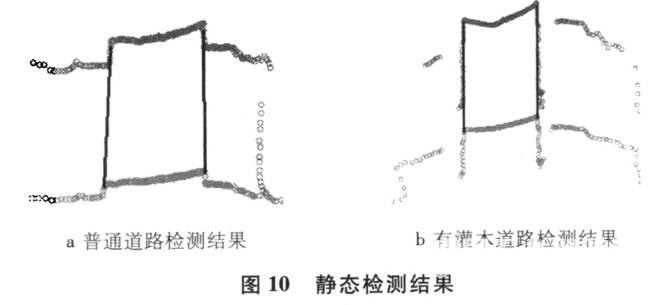
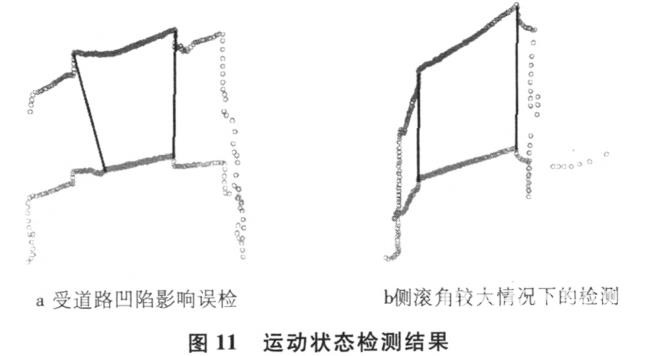
图11a为受到道路凹陷影响时的误检测,图11b为快速通过曲线道路,车辆侧滚角较大时的情况。
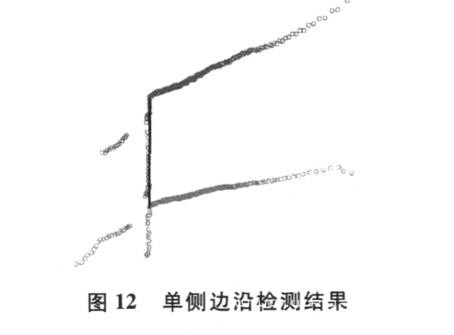
仅一侧有道路边界的情况见图12。
校内实验结果见表1。
(2)城市道路实验 城市道路边界检测结果见图13。
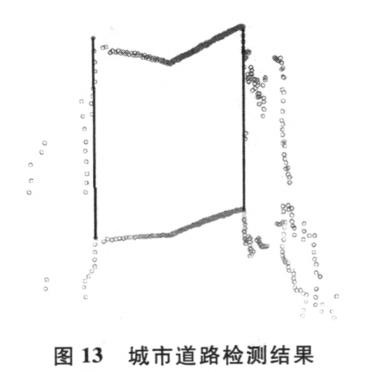
测试道路较为宽阔,因此左侧道路边缘相对点数较少;但是由图中可以看出,使用本文方法仍能够较好地检测出道路边界点。
实验路线如图14所示。
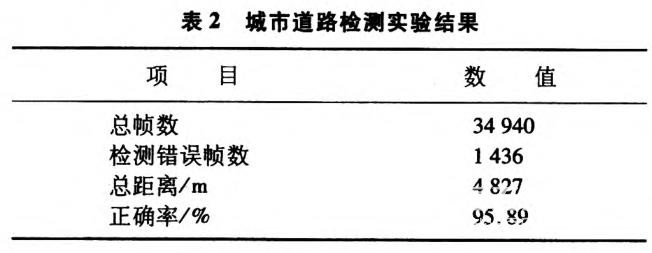
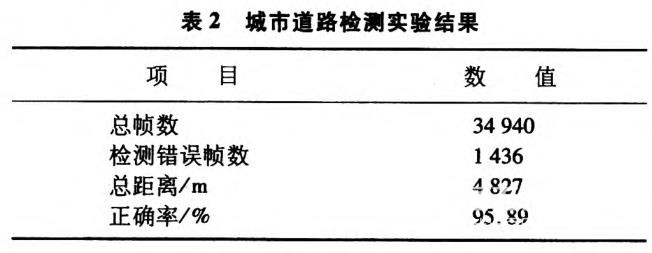
城市道路检测实验结果见表2。
5.2可通行区域合成实验
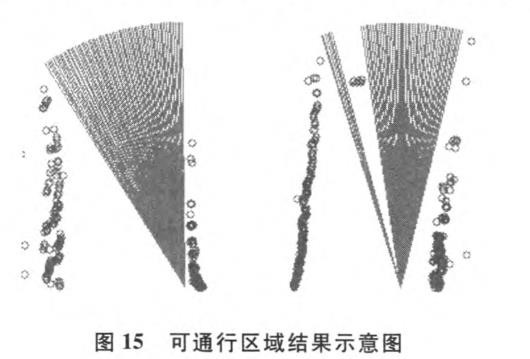
本实验中设定安全距离为30 m,则可通行区域可用一点集AR表示,

图15给出了一组可通行区域检测结果的示意图。图中的每一条直线的终点都表示一个可通行方向。
6 结束语
本文提出了一种使用3个激光雷达的道路可通行区域检测方法,在道路边界检测中使用了二次函数代替原先的线性拟合方法,达到了更好的检测效果。目前数据的融合还较为粗糙,只是简单地叠加;后期可以将水平激光雷达数据与斜向激光雷达数据进一步融合,剔除斜向激光雷达数据中被障碍物遮挡的部分,使得道路边界检测鲁棒性更强。
参考文献:
[1] 王在涛.我国大中城市交通现状分析[J].物流科技,2010(7):140—141.
[2] LAURENT BOURAOUI,STEPHEN PETYI,ANIS LAOUITI,eta1.Cybercar Cooperation for Safe Intersections[c].ITSC’2006 IEEE Intelligent Transportation Systems Conference.Toronto,2006.
[3] KIRCHNER T Heinrich. Model.based detection of road boundaries with a laser scanner[C]. International Conference on Intelligent Vehicles,1998.
[4] WEISS T,SCHIELE B,DIETMAYER K.Robust driving path detection in urban and highway scenariosusing a laser scanner and online occupancy—ds[C].IEEE Intelligent
[5] Vehicles Symposium Istanbul,2007.HEIKO CRAMER,GERD WANIELIK. Road border detection and tracking in non-cooperative areas with a laser radar system[C].German Radar Symposium Bonn,2002.
[6] 赵一兵,王荣本,李琳辉,等.基于激光雷达的无人驾驶车前方障碍物检测[J].交通与计算机,2007(2):5—8.
[7] 赵汗青,韩宝亮,王珂珂.基于摆动式单线激光雷达的障碍物检测算法[J].装甲兵工程学院学报,2010(4):5—8.
[8] 蔡自兴,肖正,于金霞.基于激光雷达的动态障碍物实时监测[J].控制工程,2008,15(2):200—203.