


麻省理工学院为自动驾驶汽车创造了一个新的系统,也许有一天能帮助自动驾驶汽车与人类驾驶员一起安全运行。麻省理工学院的一个研究小组一直在探索,自动驾驶汽车是否可以编程,对其他驾驶者的社交个性进行分类,从而使自动驾驶汽车能够更好地预测不同的汽车会做什么。
这将使自动驾驶汽车可以更安全地围绕其他车辆行驶。该团队发表了一篇论文,着眼于社会心理学工具的集成,以对涉及特定驾驶员自私或无私的驾驶行为进行分类。团队使用了一种称为“社会价值取向”(SVO)的东西,它表示某人的自私(利己主义)与利他或合作(亲社会)的程度。系统估计驾驶员的SVO,为自动驾驶汽车创建实时驾驶轨迹。对算法进行了合并车道和无保护左转的测试。该算法使研究小组能够以25%的系数更好地预测其他汽车的可能行为。
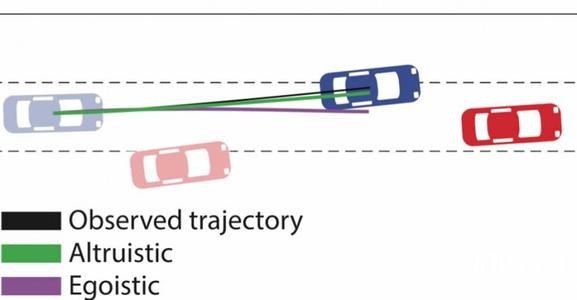
在向左转弯的模拟中,采用新算法的汽车,在驶近的汽车驾驶员更具自私性时会等待,而在另一辆汽车更具亲和力时会转弯。新算法虽然还不够强大,无法在实际道路上使用,但可以通过不同方式帮助驾驶员。
该算法可用于在后视镜中向驾驶员发出警告,警告处于盲点的汽车有一个咄咄逼人的驾驶员,允许驾驶员进行相应的调整。该算法还可以让自动驾驶汽车有一天在行为上变得更像人类。当前自动驾驶汽车的一个问题是,它们都被编程假设所有司机的行为都是相同的。这使得自动驾驶汽车在四向停车场和其他十字路口的决策保守,这可能会激怒其他人类驾驶员。






















