0 引 言
随着传感技术和电子技术的发展,汽车先进驾驶辅助系统(advanced driver assistance sys—tems,ADAS)成为了当下汽车发展的1个重要方向,ADAS在应用时要根据不同的车辆行驶工况对车辆进行相应的控制,而准确的工况识别信号是合理的控制策略的基础。目前用于ADAS行驶工况识别的传感器主要有雷达传感器和照相机传感器2种,照相机传感器具有在某些情况下不可替代及成本较低等特点,因此对利用照相机传感器进行ADAS行驶工况识别技术的研究具有重要意义。
基于照相机传感器的ADAS行驶工况识别技术的研究主要包括前方车辆的跟踪测距以及车道线的跟踪检测,对此国内外学者都分别有相应的研究,如Gideon P.Stein等[1]利用透视几何原理对前方车辆测距与速度跟踪的方法进行研究;王荣本等[2]利用车辆底部的阴影特征以及图像的纹理特征识别车辆,再通过投影变换进行车辆测距;以及用于车道线检测的GOLD[3]算法、RALPH[4]算法、LANA[5]算法等。上述方法都在一定程度上解决了利用照相机对车辆进行跟踪定位的问题,但是算法较繁琐,忽略了一些与算法精度相关的影响因素,并且没有将车辆跟踪定位和车道线跟踪检测相结合,以致不能综合分析行驶工况,不能够为ADAs控制策略提供准确的工况识别信息。
因此,笔者提出基于坐标映射与定比分线并能够抵抗俯仰角干扰的测距方法,并且在目前车道线检测方法进行改进和完善得到基于置信度判断与kalman滤波技术的车道线跟踪检测方法。并且将二者相结合,为汽车ADAS提供必要的工况识别信号。
1 基于视觉传感器的前方车辆跟踪测距方法研究
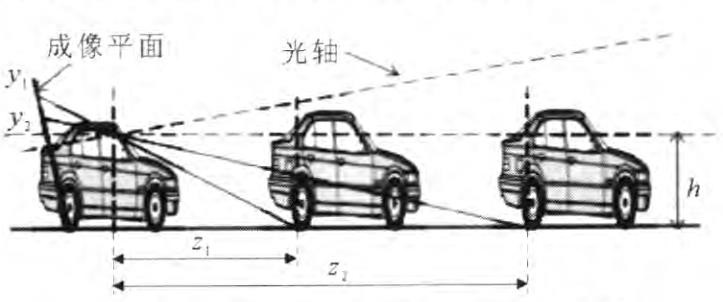
采用Adaboost分类器检测出照相机捕捉的路况图像中的车辆。然后为了能够为ADAS系统提供车辆行驶工况识别参数,笔者对前方车辆空间位置进行定量描述。目前利用图像信息进行空间定位的方法大都是基于照相机标定技术,不仅过程繁琐而且对车辆测距效果不够理想。因此笔者提出了1种基于坐标映射与定比分线且能抵抗俯仰角干扰的前方车辆测距方法。如图1所示,前车与本车距离不同时,图像中车辆底端在图像中纵坐标位置也不同,且前车与本车距离越远,前车底端在图像中位置越高,再由小孔成像原理可知,前方车辆距离与车辆底端在图像中像素纵坐标存在一定的映射关系。
笔者试图通过实验建立上述映射关系:在某乘用车上安装照相机传感器,在车辆前方已知位置处放置一系列标定板,采集图像,并获取标定板底端在图像中纵坐标,见表1。
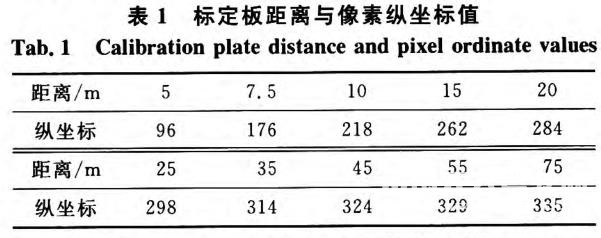
观察样本点在图像中分布规律,利用最小二乘法进行曲线拟合,提出曲线拟合函数模型,并反复修正,最后拟合结果为

式中:z为距离;x=y/100,y为像素纵坐标。该函数描述了空间距离与像素纵坐标的映射关系,从该函数中即可获得相应像素纵坐标所对应的空间距离,进而实现对前方车辆定位。
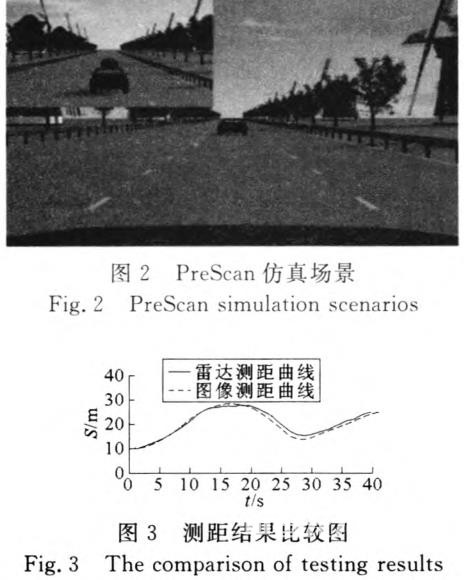
为了验证该方法对前方车辆进行测距的准确性,利用PreScan建立仿真场景,设置本车跟随前方车辆行驶,并在本车上安装照相机传感器和雷达传感器,见图2。然后利用该方法测得的距离与雷达传感器测量所得的准确距离进行比较,结果见图3。从图中可得利用上述方法测量所得前方车辆距离与雷达传感器所测得前方车辆距离差值较小(在1 m以内),因此证明了笔者提出的测距方法的准确性。
2 基于置信度判断的车道线跟踪检测方法研究
目前的车道线检测方法在大多数情况下能够提取图像中车道线,但在一些特殊情况下依然无法准确提取车道线。为了能够为ADAS系统提供更加丰富的车辆行驶工况信息,笔者对目前的车道线的跟踪检测方法进行改进和完善。完善后的车道线检测方法流程见图4。
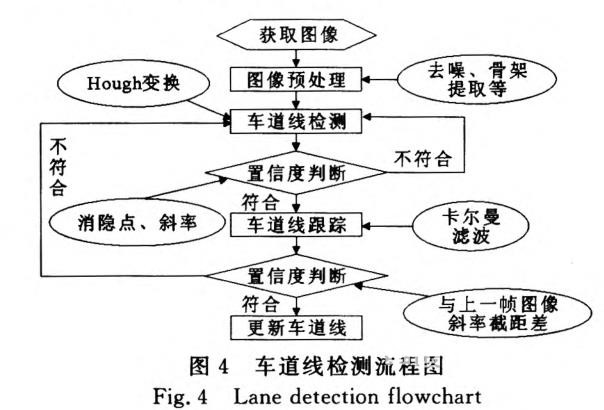
首先按照目前车道线检测方法对每1帧图像进行如下预处理步骤:高斯去噪、分区域最佳阈值二值化、删除二值化图像中不规则区域、骨架提取和膨胀。然后利用Hough变化提取图像中车道线。
为了解决在一些特殊情况下依然无法准确提取车道线的问题,对Hough变换所提取的车道线进行置信度判断。在正常情况下车道线在图像中的消隐点位于图像中椭圆形范围内。且车道线的斜率也具有一定的范围,因此以如下2个条件作为置信度判断依据。
1)当车道线在图像中延长到纵坐标为詈的h/2位置时,其横坐标值满足如下关系

式中:h为图像纵向分辨率;叫为图像横向分辨率。
2)通过对大量车道线图片进行统计,表明车道线与横坐标夹角大多数分布在40~50度之间,因此第2个置信度判断条件为车道线斜率满足如下关系
![]()
经过上述步骤,准确获得图像中车道线,再利用Kalman滤波技术,以检测所得车道线与图像底边截距和车道线斜率为参数进行滤波处理,实现对车道线的跟踪检测。利用上述步骤对实际道路中车道线进行检测结果见图5,结果显示笔者所提出的车道线根据检测技术几乎能够准确跟踪检测车道线,误差小于1度。
3 结合车辆识别、定位与车道线检测的ADAS系统车辆行驶工况判定方法研究
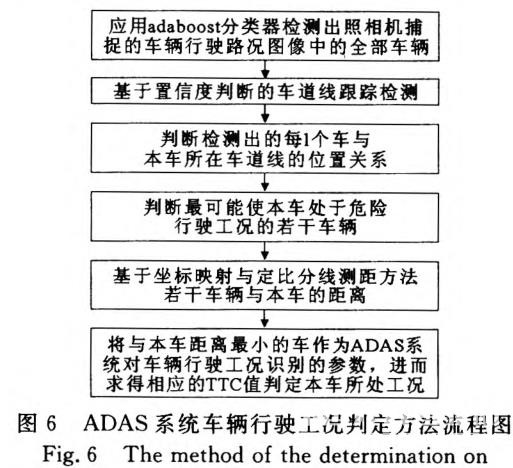
提出了1种基于PreScan的将所提出的车辆跟踪测距与所完善的车道线跟踪检测方法相结合的方法,用以实现汽车ADAS系统对车辆纵向行驶工况的识别与判定,见图6。
3.1前车与车道线位置关系的判断以及危险车辆确定
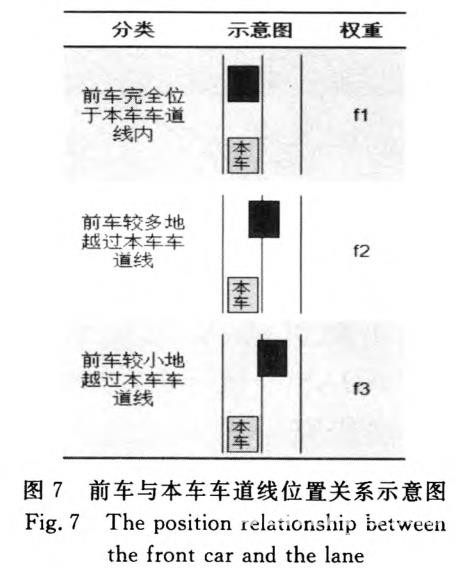
当照相机捕捉的本车行驶工况检测出若干辆汽车时,由于这若干辆汽车位于本车行驶车道线的不同位置对本车行驶安全产生的可能的影响程度不同,所以要对被识别车辆与本车车道线的位置关系进行判定。
利用PreScan将车辆检测识别技术和车道线提取技术相结合,然后对被检测车辆与本车车道线的位置关系进行分类,见图7。并对不同的情况设定对本车行驶安全影响严重程度的权重。通过比较每1个由照相机测出的车辆与应用车道线提取技术检测出的本车车道线的位置关系的权重,判定出对本车行驶安全影响最大的前方车辆,并将其与本车的距离做为ADAS系统判定车辆行驶工况的参数。
3.2 基于TTC参数的ADAS系统车辆行驶工况判定
在国内外众多碰撞预警系统算法中,CMBS[8]算法利用TTC值作为本车行驶安全性的判断指标,与笔者研究内容比较符合,因此借用CMBS算法对车辆行驶安全性进行判断。为了使ADAS系统能够对本车的行驶工况作出正确地判定,由上述确定的对本车行驶安全影响最大的前车的距离参数得到相应的TTC参数值。该算法在TTC<3时认为危险可能发生,发出报警信号,在TTC<2时发出更强烈的报警信号,在TTC<1时认为碰撞不可避免。
4 仿真验证
4.1危险车辆判断仿真验证
为了验证所提出的结合车辆检测识别技术和车道线检测技术的危险车辆判断方法,进行大量的仿真实验。其中最具有代表性的2组仿真验证结果见图8,9。
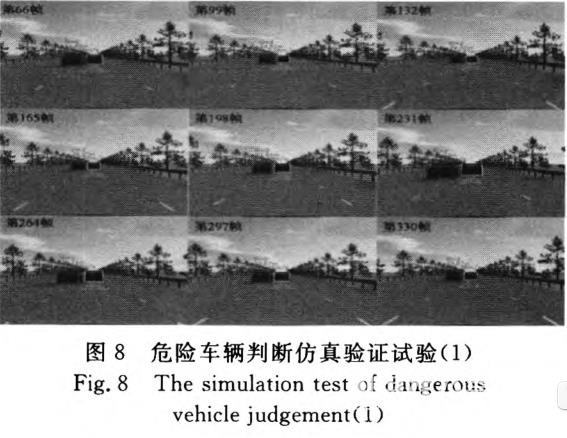
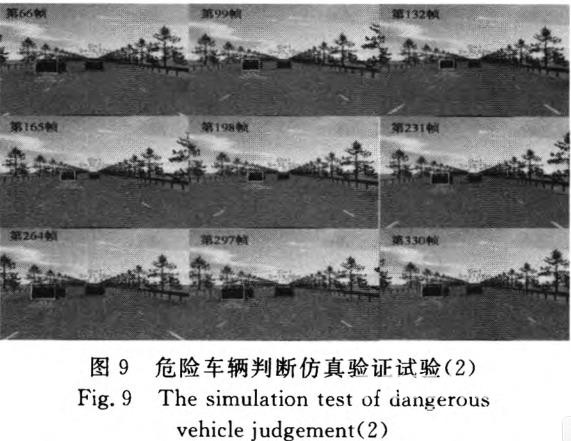
图8仿真试验的车辆行驶工况为:前方有2辆车,有1辆车A完全与本车位于同1车道上,而另1辆车B部分位于本车车道上,但B车与本车距离比A车与本车距离小。仿真结果表明,与本车距离较近且部分位于本车车道的车被判定为对本车行驶安全影响最大的车辆(在仿真实验过程中最危险车辆用红框圈出,其他车辆用黄框圈出,并且显示所有车辆与本车的行驶距离)。
图9仿真试验的车辆行驶工况为:前方有2辆车,有1辆位于与本车相同的车道上C,而另1辆车D在本车所在车道与相邻车道的中间位置上行驶而且D车与本车距离比C车与本车距离小。仿真结果表示,完全位于本车道的C车被判定为对本车行驶安全影响最大的车辆(在仿真实验过程中最危险车辆用红框圈出,其他车辆用黄框圈出,并且显示所有车辆与本车的行驶距离)。
4.2 ADAS系统车辆行驶工况判定仿真验证
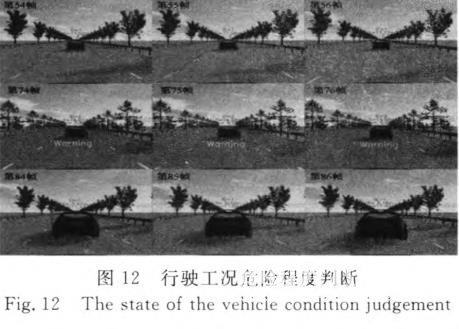
最后对所提出的将车辆识别检测、车辆测距以及车道线检测相结合的方法能否为ADAS系统对车辆行驶工况的判定提供有效信号在PreScan环境中进行仿真验证。仿真试验中车辆行驶工况如下:前车位于本车车内,且其初始速度大于本车车速,在行进过程中前车进行变速行驶。在这个行驶工况中要验证本文提出的算法能否判断出前车与本车位于同1车道内、能否通过照相机对2车间距进行实时捕捉且是否能根据2车间距得到的TTC值为ADAS系统提供车辆行驶工况危险信号。仿真验证结果见图10,11。
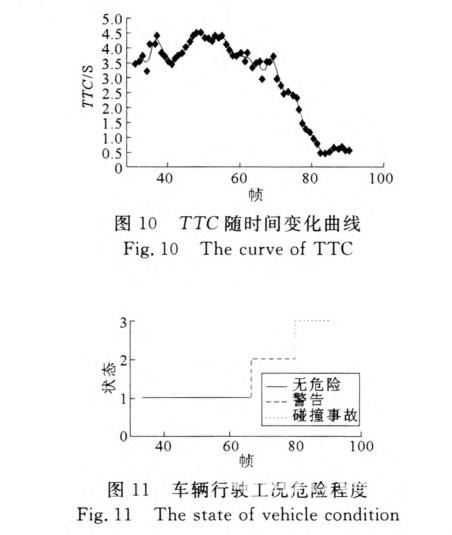
由图10和11可以得出,笔者所提出的基于照相机车辆识别检测、车辆测距以及车道线检测技术相结合的方法,能够实时检测出前车与本车距离、检测出本车所在车道线、判断出前车与本车车道线的位置关系,最后综合分析本车行驶工况危险程度为ADAS系统提供信号。图12为仿真试验过程中行驶工况判断图。
5 结束语
笔者基于视觉传感器提出了1种比较简单的、可以实现抵抗俯仰角变化对测距干扰影响的前方车辆跟踪测距方法,另外实现了车道线的准确跟踪检测,并通过实际道路试验验证方法的准确性,最后通过PreScan仿真实验实现车辆跟踪测距技术与车道线跟踪检测技术的结合,为ADAS系统提供准确的输入信号,实现的最危险车辆的判断,以及车辆行驶安全性的判断,进而证明了本研究所得方法能够对ADAS纵向行驶工况进行准确识别。
另外在进行分类器训练时所采集的样本主要是光照条件良好的环境,为了提高分类器对车辆识别的准确率,可采集如夜晚,雨雪天气,隧道等行驶工况下的样本进行分类器训练。
参考文献
[1] Gideon P.Stein,Mano 0,Shashua A.Vision-based ACC with a single camera:bounds on range and range rate accuracy[C].Intelligent Vehicles Sympo—sium,Columbus:Proceedings,IEEE. 9—1 1 June2003:120一125.
[2] 顾柏园,王荣本,郭 烈,等.基于机器视觉的道路上前方多车辆探测方法研究[J].ITS通讯,2005.7(2):28—31.
[3] Bertozzi M,Broggi A.GOLD:A parallel real—time stereo vision system for gene“c obstacle and lane detection[J].Image Processing,IEEE Transactions on,1998,7(1):62—81.
[4] Dean A,Pomerleau DA,Ralph H.Rapidly adapting lateral position handler[R].Detroit,USA:Proceed—ings of IEEE Symposium on Intelligent Vehicles,1995:506—511.
[5] Kreucher C,Lakshmanan s.LANA:A lane extrac—tion algorithm that uses frequency domain features[J].Robotics and Automation,IEEE Transactions on,1999,15(2):343—350.
[6] Viola P,Jones M.Rapid object detection using a boosted cascade of simple features[C]∥computer Vision and PatternRecognition(CVPR),Proceed—ings of the 2001 IEEE Computer Society Con{erence on.Hawaii:IEEE,2001.
[7] WU Chifeng,LIN Chengjian,LEE Chiyung.Apply—ing a functional neurofuzzy networkto real-time lane detection and front—vehicle distance measurement [C].IEEE Tramsactopms on systems,Man,and Cybernetics—partc:Applications and Reviews,2012,42(4).577—589.
[8] Bella F,Russo R.A collision warning system for rear—end coUision:a driving simulatorstudy[J].Pro—cedia—Social and Behavioral Sciences。2011,20(11):676—686.
[9]童宝锋.基于视觉传感器的前方车辆跟踪定位方法研究[D].长春:吉林大学,2014.
[10] 崔高健,黄银花,田原嫖.基于立体机器视觉的前方车辆探测[J].计算机测量与控制,2006,13(9):890一891.
[11] 李克强.汽车智能安全电子技术发展现状与展望[j].汽车工程学报,2011(2):4—17.
[12] 魏武,龚树锋,龚树超.一种改进的基于视频的车辆检测与识别方法.计算机测量与控制,2010,19(1):20一22.
[13] 李文波,王立研.一种基于Adaboost算法的车辆检测方法口].长春理工大学学报,2009,32(2):292—295.