


自汽车诞生以来,人类对于能够自动驾驶的汽车的想象就从未停止,在科幻小说和科幻电影中,总能看到自动驾驶汽车的身影。现实中,人类对于自动驾驶技术的实现一直在付诸行动。

前世今生
早在20世纪20年代,美国一家无线电控制公司在纽约大街上展示了一辆名为“Linrrican Wonder”的无线电控制自动驾驶汽车,汽车上装载了无线电接收装置和控制单元。随后半个世纪里,美国、英国等国家纷纷提出了自动驾驶汽车的设想,通过在路面铺设电路、磁条等方式引导和控制车辆按照一定轨迹和速率行进。这类自动驾驶技术被称为引导式自动驾驶,是实现自动驾驶目标的早期路径,但受限于自动化交通环境改造成本过大,引导式自动驾驶研究在20世纪70年代逐渐搁浅。
20世纪80年代,德国和美国都推出了配备摄像头、微处理器和其他传感器等部件的自动驾驶汽车,能够在封闭环境下实现一定程度的自动驾驶。进入21世纪以后,得益于人工智能、云计算、大数据等新技术的飞速发展,自动驾驶技术的研究才真正取得突破性进展。2004年,美国国防部高级研究计划局(DARPA)开始每年举办比赛吸引各科技团队来建造自动驾驶汽车。正是这场赛事,开启了自动驾驶新革命,当时参加此项赛事的众多工程师们,已经成为自动驾驶汽车行业的中流砥柱,例如被誉为“谷歌自动驾驶汽车之父”的斯坦福大学终身教授、人工智能专家Sebastian Thrun,他领导的团队获得了2005年赛事冠军。在高德纳咨询公司(The Gartner)推出的技术成熟度曲线中,自动驾驶技术于2013年初次登上技术成熟度曲线,并于2015年上升至曲线顶峰位置,已成为当下最炙手可热的新技术之一。越来越多的研究机构和企业开始研发自动驾驶技术,其中不但有传统汽车制造商,也有互联网企业。
如今,在美国硅谷的Google总部附近,常常能看到方向盘前没有人的汽车在路上行驶,这在当地已经不是什么新鲜事。部分低速或封闭环境下的自动驾驶汽车已经投入商用。曾经存在于人类想象中的自动驾驶汽车正在离人们的生活越来越近。
技术原理
自动驾驶汽车是一个复杂的系统工程,须由多种硬件、软件协同发挥作用。一般而言,所有的自动驾驶系统均可大致分为三大部分,即环境感知、行为决策和运动控制。系统的构成类似于人的驾驶行为决策过程。环境感知模块,人类用眼睛观察路况,而自动驾驶系统则是借助激光雷达、毫米波雷达、超声波雷达、摄像头等传感器来获取道路环境信息,用GPS(全球定位系统)和IMU(惯性测量单元)获取车身定位信息。行为决策模块,人类用大脑处理环境信息结合驾驶经验作出判断,自动驾驶系统通过算法提取传感器中的有用信息,将信息转换至统一坐标系下进行信息融合,并根据融合信息、路网信息和自身行驶状态,按照一定规则产生驾驶决策。运动控制模块,人类根据决策通过手脚控制车辆方向盘、加速和刹车,自动驾驶系统则是根据产生的驾驶决策输出至控制器来控制车辆。
自动驾驶的分级
自动驾驶技术的研发是渐进式的,都有相应的规范和标准,需要明确的分级标准来引导行业发展。目前对于自动驾驶分级最为权威的标准是美国汽车工程师协会(SAE)的J3016标准,将自动驾驶分为6个等级,并明确了不同级别间的差异,如表1所示。

表1:SAE自动驾驶的分类
自动驾驶依赖于“高精地图”
人类驾驶是通过眼睛、耳朵等器官去感知车身周边环境,凭借道路记忆或传统导航地图,依靠驾驶经验及技巧保证汽车安全行驶并到达目的地。自动驾驶系统用传感器替代了人类感官,用地图替换了人的道路记忆,用软件、云计算、深度学习等替代了驾驶经验及技巧。地图之于自动驾驶的核心作用在于降低环境感知的难度,提供更加完善的周边环境以及更精准的定位精度和可靠性,供自动驾驶汽车进行行为决策。
目前,主流的自动驾驶技术方案分为两类技术路径:一是“强地图”,依赖地图等提供先验知识,传感器将感知的环境信息模型与地图匹配以确定车辆位置,并探测障碍;二是“强感知”,降低地图精度、地图要素等方面要求,将其作为传感器的补充,传感器感知周边环境并建立实时环境模型,依靠深度学习理解传感器信息并做出反应控制车辆。目前业内对于地图是自动驾驶不可或缺的认识是统一的,但对于“自动驾驶需要什么样的地图”的认识尚存在分歧。从实际应用来看,“强地图”方案在当前技术水平下可行性更高,“强感知”方案在技术和可靠性上尚待突破,走在自动驾驶技术前沿的公司采用的方案均为搭配高精地图的方案。
自动驾驶汽车里的地图是什么样的
自动驾驶汽车里的地图的名称有多种说法,例如高精地图,它是从国外H i g h Definition Map(HD Map)的说法直译过来的名词,此外还有高度自动驾驶地图(Highly Automated driving map,HAD Map),高可信地图(Hoch Genaue Karte,德语)等说法。上述说法都不太严谨,准确来说,应该称为“自动驾驶地图”或“自动驾驶专题地图”,即用于自动驾驶汽车的专题地图,类似于地形图、行政区划图等用于某一专题功能的地图。
实际上,自动驾驶地图是为自动驾驶车辆构建了一个映射现实的虚拟道路环境模型。它包含最底层的静态高精度地图、动态驾驶环境(拥堵情况、道路事故、施工等信息)、互联设施(V2V、V2X等通信设施)以及移动物体(行人、车辆等)信息。底层的静态高精度地图是其中的重中之重,当前典型的静态高精度地图是矢量高精图,也被称之为语义地图,它包含道路属性(车道数、施工状态等)、车道模型(车道线、曲率/坡度、中心线、车道属性变化等)、交通设施模型(交通信号灯、斑马线、停止线、交通标志等)等内容(如图1所示)、定位对象(用于实现车辆自定位)。
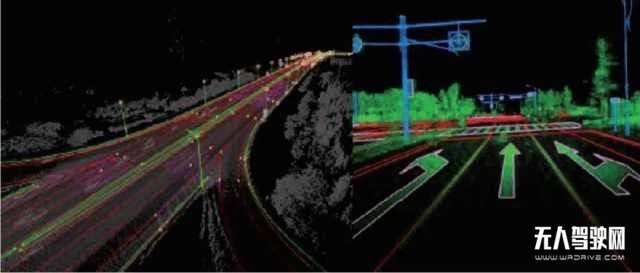
图1:静态高精度地图的部分内容
目前,各图商制作的自动驾驶地图在高精度地图表现形式上存在差异,包括矢量高精地图、栅格图、激光雷达占位图、反射率图等。由宝马、大众、戴勒姆等欧美车厂共同成立的导航数据标准协会(Navigation Data Standard Association,NDS),近年来一直在定义自动驾驶地图的统一标准,通过制定统一标准使各图商间的自动驾驶地图产品兼容、适配。
与传统导航电子地图相比,自动驾驶地图的内容、形态、制作工艺等存在较大差别,且复杂度更高,具体如表2所示。
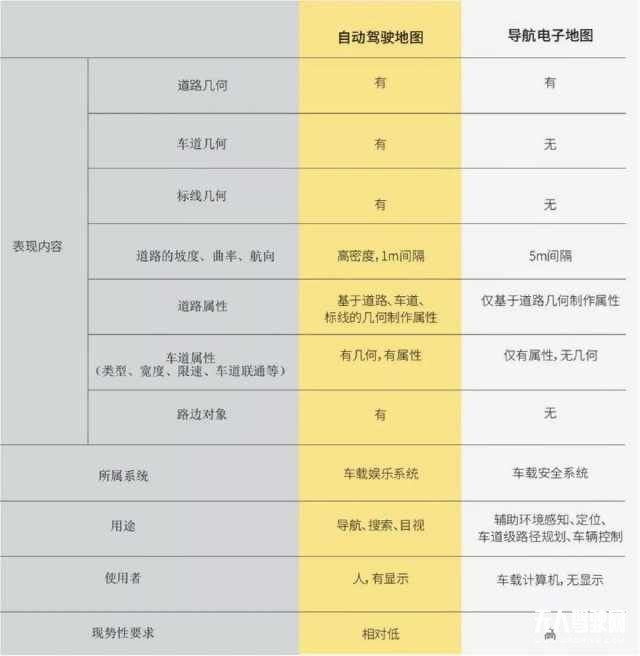
表2:自动驾驶地图与导航电子地图的部分差异
自动驾驶地图面临的挑战
作为一个新兴事物,自动驾驶地图在高速发展的同时,也面临着诸多挑战。首先,自动驾驶地图到底是什么样的?目前全球还未有达到Level3级别自动驾驶量产车问世,根据各大车厂的时间表,Level3级别的自动驾驶车辆将在2020年左右量产。各大图商所制作的自动驾驶地图大多数是面向Level3级别自动驾驶汽车。从Level3到Level4,从Level4到Level5的自动驾驶技术难度比Level2到Level3要大得多,这两个级别的自动驾驶技术差异巨大,所依赖的自动驾驶地图也将发生变化,这个变化目前还不可知。
其次,自动驾驶地图到底需要多高的精度?自动驾驶地图中,不同数据内容所需的精度要求是不同的,例如车道宽度精度要求在±10cm,交通标志牌精度要求在±50cm,绿化带精度要求在±20cm等。不同场景所需的精度要求不同,例如在隧道、室内的场景,由于定位精度达不到±10cm,其他要素如车道宽度的精度即使达到±10cm也没有意义。
再次,自动驾驶地图的更新问题。自动驾驶地图的更新频率要比传统导航电子地图高得多。目前自动驾驶地图的制作还是依赖专业化的采集队伍,更新频率还达不到自动驾驶要求,且随着更新频率、精度的提升,地图生产成本急剧上升,单单依靠图商的力量无法满足要求。未来要实现地图动态更新,必然要采用众包方式。图商通过构建地图更新体系,将数据提供给政府、车厂、普通用户甚至其他图商,使用者通过不断回传数据来更新地图。但这其中要解决的问题还有很多,例如数据的可靠性和精度,更新闭环能否无缝衔接,用户提供数据的意愿,安全保密问题等等。
自动驾驶地图的政策问题
从自动驾驶地图的定义、内容来看,其仍然是属于地图的范畴。自动驾驶地图的法规政策问题在国际上一直存在,只是各国尚未针对自动驾驶地图进行专门立法,自动驾驶地图的制作和使用仍然适用于各国测绘地理信息法律法规。从现行自动驾驶发展较快的国家的测绘和数据法律法规来看,各国对于安全问题特别是国防安全和国家利益都十分重视,只是因国情的差异,各国在法规政策的侧重点上有所不同。例如,美国最大限度地放开了地理信息使用和共享,以保持其在世界的领先地位,在自动驾驶地图准入管理、数据出境等方面均没有限制。德国特别重视个人隐私数据的保护,在满足个人隐私保护的基础上,尽可能减少限制。日本较美、德更为保守,政府在自动驾驶地图的发展中起核心主导作用,地图基础数据的采集和研发均由名为动态地图计划(Dynamic Map Planning Co.,Ltd,DMP)的平台公司统一进行,日本的管理政策在准入管理、成果汇交均有相关规定。韩国的自动驾驶地图也是由政府主导,其管理政策在执业资格、准入管理、成果汇交、数据出境方面规定更为严格。我国主要出于国家安全方面的考虑,也形成了特色的法规政策。根据《关于加强自动驾驶地图生产测试与应用管理的通知》,我国仍然将自动驾驶地图作为导航电子地图进行管理,从保密安全、资质管理、公开地图内容表示、地图审查、外商投资等方面对自动驾驶地图都存在限制,对自动驾驶地图的发展造成一定影响。考虑到自动驾驶的蓬勃发展势头,按照“底线思维”适时调整我国自动驾驶政策迫在眉睫。






















