



基于地标:根据视觉或者激光雷达的定位,与数据库中的特征匹配,确定车辆本体的位置和环境。
基于信号定位:采用外界的位置信号,如卫星系统(GNSS)和5G;
基于惯性导航技术:在了解车辆的位置后,计算车辆的当前位置和方向。航位推算的本质是在初始位置上累加位移矢量计算当前位置,它是一个信息累加的过程。
在当前的使用的三种定位技术中,通过组合使用效果,比较典型的为1)基于差分GPS和惯性传感器融合;
2)基于LiDAR点云与高精地图的匹配;
3)基于视觉的道路特征识别。其中第一种基于差分GPS+惯性导航的融合,是最为常规的定位方法,用在车辆导航里面。单凭GPS,在无法接收GPS数据或者接收状态恶劣的条件下,就无法判别车辆的确切位置,而且需要考虑其可靠性。惯性传感器是检测加速度与旋转运动的高频(1KHz)传感器,对惯性传感器数据进行处理后我们可以实时得出车辆的位移与转动信息。6自由度对应的惯性测量单元是不受气象条件、附近其他车辆、车速等影响。在这个里面,通过惯导进行朝向修正,可以在车辆低速行进时提供准确的朝向信息。
在技术发展中,传感器被封装成芯片解决方案,以村田的SCC2000为例,可在ECU内实现6个自由度的解决方案。具有稳定的偏置特性、低噪音、高耐振动性和宽温度(-40-125度),在高精度、高可靠性的自动驾驶高精度定位应用中,如果要实现高可靠性和性能,此类芯片是不可或缺的。
使用惯导、轮速和GPS信号是可以进行组合的。而通过使用基于卡尔曼滤波的传感器融合技术,我们可以融合GPS与惯性传感器数据,各取所长,以达到较好的定位效果。
1)在自动驾驶中,则考虑的定位方式是GPS+IMU+高精度地图+激光雷达信息融合的定位方法。利用车辆之前介绍的GPS结合IMU做出大概位置判断后,使用高精度地图与激光雷达SLAM云点图像与之对比,在一个坐标系内做配准,通过配对后确认自车位置,这是目前最成熟,准确度最高的方法。
2)在不用激光雷达的时候,也可以采用GPS+IMU+视觉定位的方法,由于摄像头信息依赖于本身的特性,所以也需要使用管道来辅助摄像头姿势识别,结合惯性传感器和GPS/视觉传感器可以为行驶在道路上的汽车精确定位。
备注:视觉坐标系与惯导坐标系的融合系统,两个数据通常是不同步的(耦合方式的不同,是考虑是否把视觉和惯导的数据融合在一个优化的滤波器内)。在系统中选用不同的视觉传感器,单目一般采取紧耦合,而双目则采用松耦合。单目摄像头借助IMU来实现绝对尺度的估计。双目立体视觉可通过左右图像匹配来恢复特征点的三维坐标。
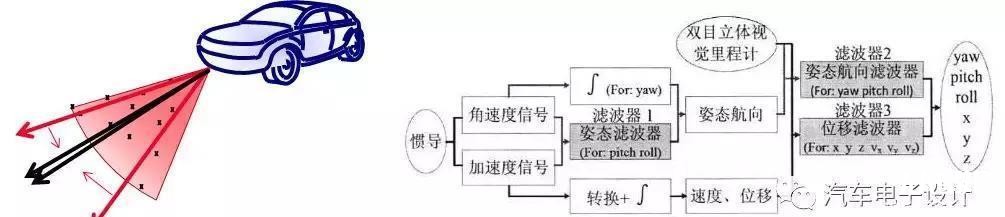
图5视觉和惯导的整合
小结:目前在自动驾驶里面,惯导的使用是基本的一环。感知技术和定位技术相辅相成,在边界条件下,提供定位的准确性、可靠性,提高算法的准确性和及时性是技术发展完善的必然要求,我们未来会看到越来越完善的方案。























