


5月21日,清华大学车辆与运载学院2016级硕士研究生余大蒙(导师为李克强教授)提出的一种基于深度卷积神经网络的车载视觉实时联合感知模型,在自动驾驶领域国际著名的KITTI目标检测与朝向估计(Object Detection and Orientation Estimation)评测任务中,获得行人类别的第一名(1/74),同时获得了车辆类别第三名(3/139)。
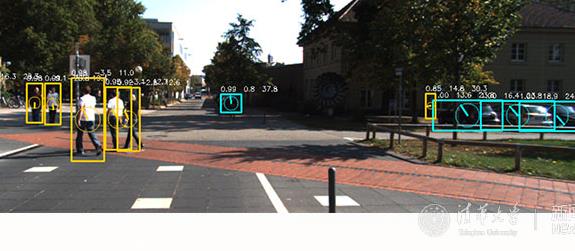
实时联合感知模型的目标检测和朝向估计效果图
实时联合感知模型基于车载单目视觉,使用单帧图像作为模型输入,同时输出车辆、行人和骑车人等动态目标的三维位置、朝向、类别和尺寸信息及道路分割结果。在KITTI行人检测与朝向估计评测中,该模型以70.57%的平均朝向相似性(Average Orientation Similarity,用于联合评估检测精度与朝向估计精度的评价指标),大幅领先第二名67.66%的成绩名列榜首;同时,0.06秒的单帧算法耗时也大幅低于其他方法。斯坦福大学、多伦多大学、马克斯-普朗克研究所、香港中文大学等全球多个国际顶尖研究团队参与了这两项KITTI评测任务的竞争。
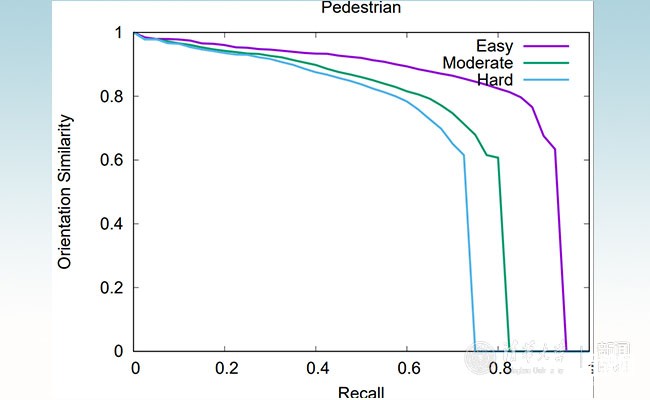
KITTI行人类别的朝向相似性-召回率曲线
李克强教授带领的智能车辆团队在智能网联汽车领域已有多年的研究,在该领域顶级的国际期刊与国际会议发表了多篇高水平论文,同时拥有多项相关发明专利。团队围绕智能网联汽车及新能源汽车,探讨人工智能和自动控制在下一代汽车的应用,聚焦感知、决策、控制等核心技术研发,努力提升下一代汽车的安全、节能、环保、舒适等综合性能。























