2013年12月2日,我国成功发射嫦娥三号探测器,“玉兔一号”在月面开展巡视探测,圆满完成探月工程三步走中“落”的目标。
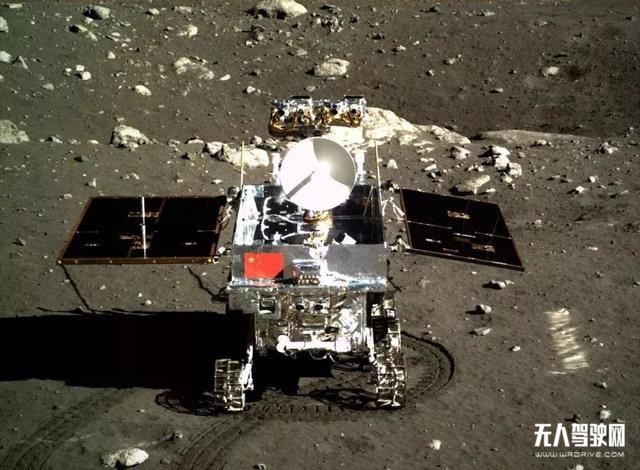
“玉兔一号”在月面开展巡视探测
2018年12月8日,我国成功发射嫦娥四号探测器,通过地月L2点中继卫星,“玉兔二号”实现了人类首次在月球背面的巡视探测。
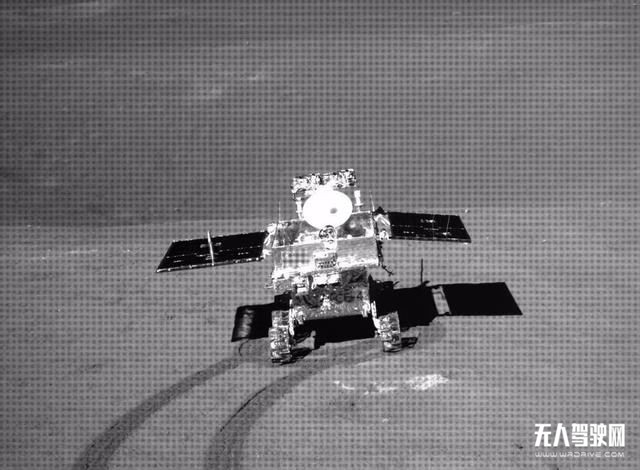
“玉兔二号”在月球背面开展巡视探测
除了我国的“玉兔号”无人月球车,前苏联在1970年11月和1973年1月,先后利用“月球-17号”“月球-21号”探测器,成功把“月球车-1号”“月球车-2号”送上月球。
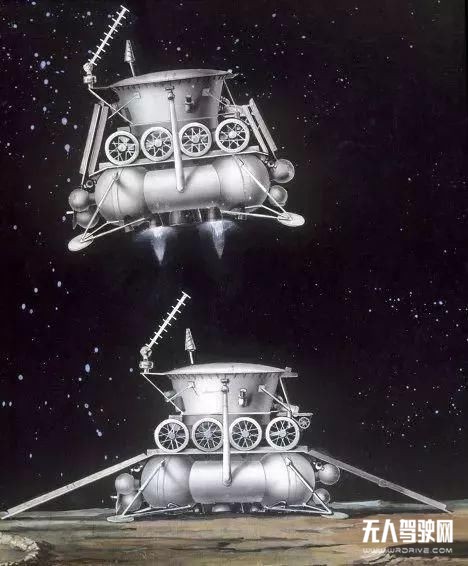
“月球-17号”和“月球车-1号”探测器
“月球车-1号”及“月球车-2号”任务的月面探测位置
“月球车-l号”重756kg,长2.2m、宽1.6m、高1.92m,安装8个直径为51cm的独立悬挂车轮,只要有两个车轮工作就能够实现移动。
“月球车-1号”没有转向轮,但它可以通过像坦克履带那样改变两侧车轮的速度差来实现转向。“月球车-1号”有2档运动速度,1km/h,和2km/h,可爬上30°的斜坡,越过40cm高的障碍物、跨越60cm宽的沟壑。
由于月面崎岖不平,无线电传输迟滞,导致它的实际使用速度远小于设计速度,大约只有0.14km/h。

“月球车-1号”模型
车上安装3台摄像机和4台全景像机,向地球实时传送图像信息。
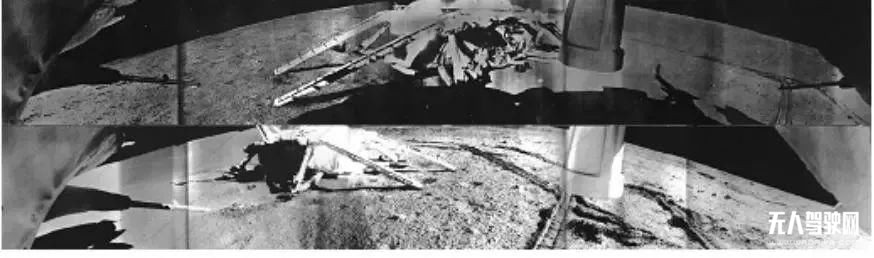
“月球车-1号”拍摄到的“月球-17号”着陆器
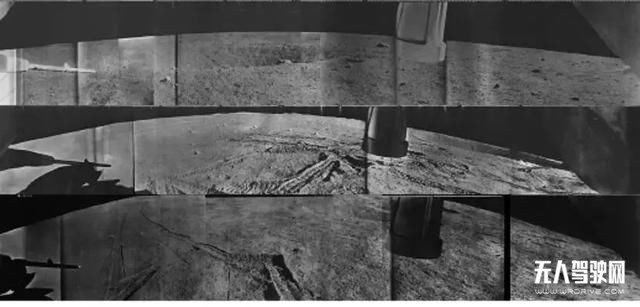
“月球车-1号”拍摄的月面照片及其车辙痕迹
整车设计寿命3个月,实际工作了301天,直到1971年10月4日,钋-210燃料电池耗尽才停止行驶,行程10.54km,考察月面8万平方米,是世界上首次无人月面软着陆与巡视探测任务。
“月球车-2号”在“月球车-1号”的基础上,对底盘结构和科学仪器做了改进,大大提高了车体性能。

“月球车-2号”模型照片
它在月面共停留4个月,行进了37km,发回86张全景照片、8万多张电视图片。

“月球-21号”探测器落月位置及“月球车-2号”的移动轨迹示意
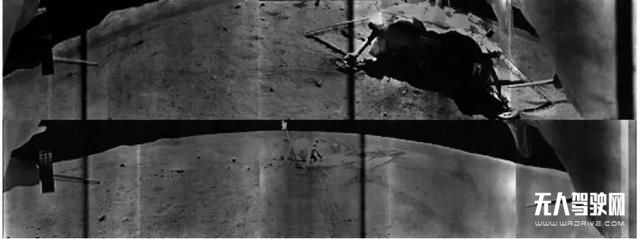
“月球车-2号”拍摄到的“月球-21号”着陆器
“月球车-2号”在1973年5月9日意外驶入被阴影遮挡的直径5m的撞击坑,在月球车自动倒车退出撞击坑时,车体刮到了坑壁,导致激起的月尘覆盖太阳帆板,在进入月夜休眠收拢太阳帆板时,月尘溅落在辐射源上,致使月球车再次月昼唤醒时出现供电和热控问题死亡。
广袤无垠的大地上,我们的玉兔还在昼夜不停地工作。月球上的无人驾驶究竟是如何做到的?完全不需要人为操控吗?
前苏联对“月球车-1/2号”的驾驶由包括指挥员、领航员、驾驶员、参数分析工程师和定向天线操作员在内的五人组成的地面遥操作组共同完成。

“月球车-1号”和“月球车-2号”的操作手
月球车的控制中心主要包括指令发送站、遥测接收站、电视设备、信息计算系统和时统设备等,就位于测控站内。
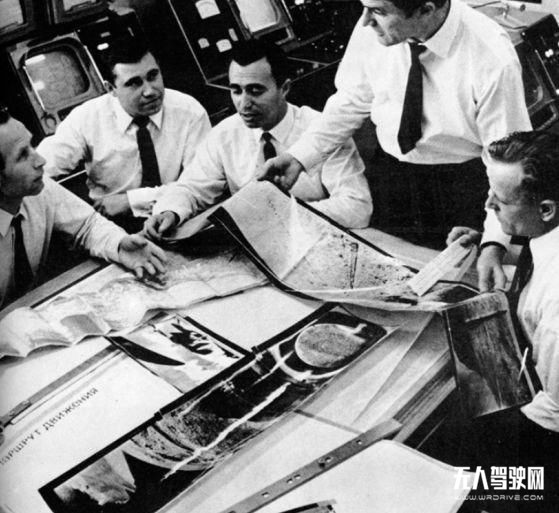
操作人员正讨论月球车的路径规划
地面通过8个8m口径天线组成的天线阵系统向月球车发送遥控指令,通过8个15.8m口径天线组成的天线阵系统接收月球车各类数据。

乌克兰耶夫帕托里亚站8×8m发射天线阵系统
耶夫帕托里亚站8×15.8m接收天线阵系统
地面遥操作组根据“月球车-1/2号”前端安装的一对电视镜头获取的图像完成月面障碍辨别、距离确定和道路可通行性分析等工作,控制月球车在月面移动,每天约进行30次控制。“月球车-1号”的图像传输速率为20秒一帧,操作效率极低,到了“月球车-2号”时,提高到3.2秒一帧,大大提高了地面控制月球车在月面的移动效率。

“月球车-1号”和“月球车-2号”的地面遥操作控制设备
“月球车-3号”原计划于1977年发射,但由于运载火箭和资金等原因终止。如今被放置在莫斯科的拉沃奇金科研生产联合体的博物馆内。