


“我们要在2013年创建一个零事故、零拥堵的交通体系。使出行和物流的成本降到三分之一,道路和停车的空间减少三分之一,三分之一的路上总时间成为生产力时间。”这是驭势科技联合创始人兼CEO吴甘沙对无人驾驶带来的变革做出的总结,同时将它作为驭势科技奋斗的目标与使命。

驭势科技联合创始人兼CEO吴甘沙
“研究的意义,就是让人们的生活更美好。”——从英特尔中国研究院院长转变为一家无人驾驶公司的CEO成为一个创业者,吴甘沙并没有止步于科研,而是让科研更好地为人们的日常出行服务。
不谋全局者不足以谋一域
2016年吴甘沙从英特尔辞职创立了驭势科技。同样是在2016年,Uber开始在自动驾驶方面大肆投入,但驶向的是一条崎岖又坎坷的迷茫路。2016年至今,Uber已投入了11亿美元,其中经历了Waymo的专利纷争,损失2.45亿美元期权,“无人车撞人门”,自动驾驶业务一度停摆九个月之久。当初预计2018年盈利的期望已然落空,2019年拥有7.5万辆无人驾驶的出租车已不可能实现。
“不谋全局者不足以谋一域”。无人驾驶的全局在吴甘沙看来其核心就是——车上没有对安全负责任的人。吴甘沙认为:“AI担负起驾驶员的’大脑’,这是一个‘数据驱动’的决策系统。”
“这个场景你见过你就会,没见过就不会。这个形式策略在我的规则里面定义过了我就会,规则里面没定义过就不会。自动驾驶目前还缺乏像人类一样举一反三、触类旁通的能力。在Robotaxi这个领域,大规模的商业落地还需要很长的路要走。”
无人出租车遇到的困局吴甘沙有自己的解决之道,无人驾驶的商业化之路吴甘沙有自己的评判标准。“首先判断用户是不是真实的需求,客户只是想要做个演示显示一下自己的科技感,那不是真是的需求,真实的需求应是高频的。其次是要能清账,找到刚需。正所谓‘水大鱼大’大江大河才有大鱼,市场空间足够大,客户才能为贵出十几、二十万的成本买单。最后是使用场景现在的技术水平是不是真正能实现无人化,便于量产。”
“我们找到了一些场景,比如机场物流、大型集成需要三四千的司机,工作环境恶劣,刮风、下雨、高噪音、夏天气温炎热,司机难招、培训成本、流失成本这些加起来对企业而言将是很大的风险和负担。另外,自动代泊车也是一个很好的场景。停车场不需要改造,车上只需要摄像头、超声波传感器以及AI算法就能很好地实现。”
上兵伐谋 :吴甘沙的十六字生态观
正所谓“人无远虑必有近忧”。“远虑近忧”在吴甘沙看来,Uber这样的大型互联网出租车企业涉足后,所有的无人驾驶系统都将同质化,这会对高端车型是重大打击。用户打车的时候不在乎底层采用什么品牌的自动驾驶技术。近忧则是当前整个车市低迷,如何对自动驾驶技术做投入的策略选择成为当前的要务。“
要打有准备之战,“先计后战”。2018年Waymo的工程总监在MIT的演讲给吴甘沙这样同是在无人驾驶领域拼搏的创业者提出了忠告与建议:你以为你走完了90%的路,结果最后的10%还需要90%的时间和努力才能够走完(When you’re90% done,you still have 90% to go.)吴甘沙深刻理解到:自动驾驶这个领域是长跑不是短跑,对技术能力、资本能力、管理能力都是很大的挑战,因此要做好要好长期计划。
汽车产业历史悠久、产业链庞杂多变,一家企业不可能一枝独秀,要建立起一个生态做出增量市场才能推动无人驾驶向前发展。“远交近攻”是吴甘沙的生态选择:对于没有直接冲突的大厂商,要形成命运共同体,共同研发,在生态立创新。目前的合作伙伴数量仅次于百度。而对于直接的竞争对手要勇于争夺市场。
企业最重要的是生存,无人驾驶是一个新技术,首先要找到适合的土壤才能发展壮大,“先胜后战”就是要为企业发展赢得时间、空间。吴甘沙认为:“和其他伙伴进行协同创新,通过深度合作去利用生态中各方的互补性优势,使自己在未来竞争格局中能够处于有利的局面。”
U-Drive:智能驾驶系统的“智胜之术”
吴甘沙将驭势科技核心产品U-Drive总结为:“兼容并蓄”、“取法乎上”、“算无遗策”、“面向未来”。
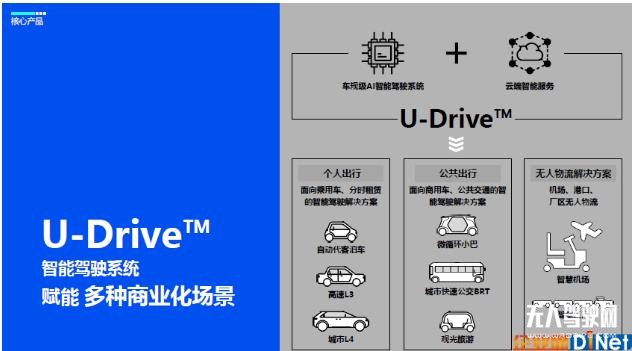
兼容并蓄: U-Drive是一款面向多场景、高级别自动驾驶的智能驾驶系统,包括AI算法、智能驾驶控制器、云端智能驾驶大脑等核心模块。它可适配大量主流车型(乘用车/商用车/物流拖车等),并具备自我升级能力,未来可持续开放并强化更多自动驾驶功能、软件和应用,最终实现开放道路的无人驾驶。
取法乎上:驭势采用多传感器融合方案,能够给无人驾驶车辆提供全场景、全天候、全方位实时感知环境和厘米级高精度定位能力,即使面对复杂道路、各种天气条件、复杂交通场景下,可实现全方位实时准确感知周围的行人、车辆等障碍物、红绿灯、交通标志,以及通过多源定位融合技术实现厘米级高精度定位能力。
算无遗策:驭势科技自主研发了专为L3-L4级自动驾驶提供高性能、高集成、车规级的智能驾驶控制器,可运行环境感知、融合定位、实时决策、车辆控制等任务,经过车规要求的严苛测试后,该产品成为业界首款可规模量产的智能驾驶控制器。代客泊车的场景下目前达到了,零失事故、97%成功率的良好成绩。
面向未来:通过云端的无人驾驶运营管理平台,智能驾驶仿真系统,人机交互系统和数据管理平台等几大模块实现对车端传感器数据的采集、存储、传输及分析流程自动化,不断优化无人驾驶算法、系统安全性及用户体验,对系统组件做实时和预测性的运维,支持无人驾驶应用的运营和管理。同时远程监控系统可以进一步增强系统在复杂环境下的运营能力。























